機械系の基本設計、及び性能
分光器筐体の機械的構造は、基板、望遠鏡への取付け面板、側面板、 ステイ、及びリブから成る(cf.
Fig. 16を参照)。 全ての光学系・機械系部品は基板に載る。
マグナム望遠鏡に対する条件からくる分光器へのサイズと重量への制 限のもとで、有限要素法のソフトウェアANSYSを用い、機械設計を行
った。 これらの制限は、すばるのカセグレン装置への条件をも満たすもので ある。
分光器の全ての姿勢に対して、筐体のたわみを押さえるよう、細心の 注意が払われている。
装置に対する要求は以下のものである。 (1)装置のたわみが30μm以下であること。
この場合、Code Vのtolerance解析によれば、像質が劣化しないこと が保証されている。
(2)焦点面の中心からの光のCCD上での動きが 約 1ピクセル以内におさまること。
これは、単に良質の像を得るためのみならず、IFSモードで 正しいキャリブレーションを行うために重要である。
我々はANSYSを用いて、全ての分光器姿勢に対するたわみを計算し、 たわみの最大値を30μmに押さえ込むような設計を実現すること
に成功した(Fig. 16)。 また、計算されたたわみの分布がCCD上の像の移動にどのような影響
を与えるかをCode Vを用いて計算した。 これにより予想される移動量を1ピクセル強という問題無いレベルに
押さえることができた。 実際、赤外シミュレータに取付けての試験において、我々は分光器を
あらゆる姿勢におき、 CCD上の多瞳像の動きを調べた。 Fig. 17の通り、
この動きは予想された量とほぼ同じ量であることが確認された。 Fig. 18は、この実測値をもとに、天体を追尾
したときの様子をシミ ュレートしたものであり、移動量が全く問題無いレベルに押さえるこ
とに成功したことがわかる。
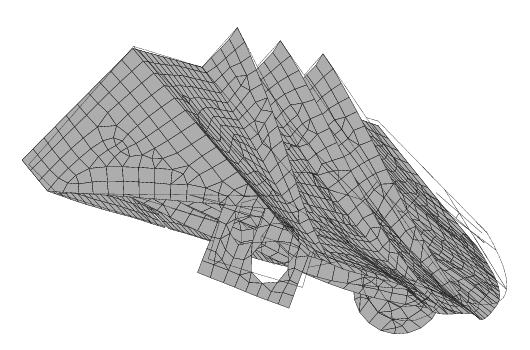 |
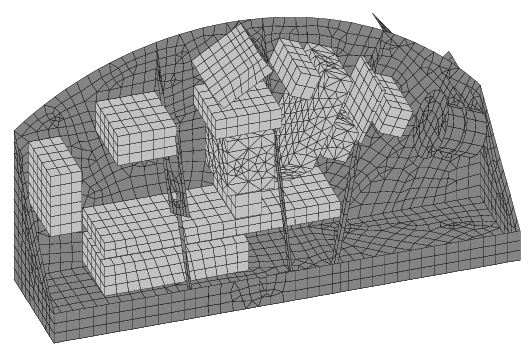
図 16: (上) 計算に用いた要素分割の様子。
(下) とある望遠鏡姿勢に対して計算された分光器のたわみの例。 重力はこの図で下向きに働いている。
点線は重力が無いときの分光器の形を表しており、 たわみは5 × 103倍に誇張して描かれている。
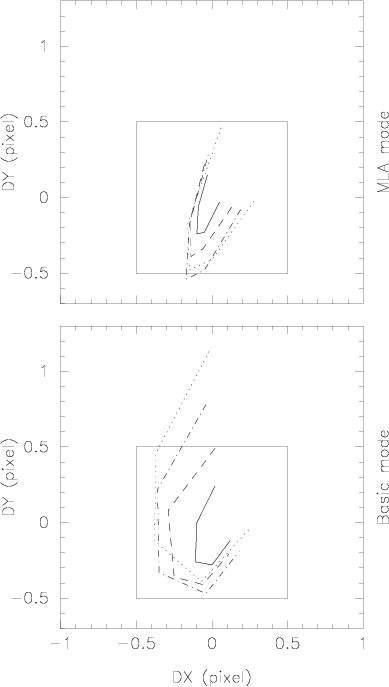
図17 赤外シミュレータに取付けて、3DIIをあらゆる姿勢におき、IFSモードにおけるCCD上の多瞳像の動きと、基本モードにおける望遠鏡焦点面上の物体に対するCCD上の像の移動量を調べた。これらの動きは予想された量とほぼ同じ量であることが確認された。正方形は1ピクセルの大きさを示したもの。
図18 図17にあるCCD上の多瞳像の動きの測定値から、赤外シミュレータ上で実際に天体を追尾したときに予想される多瞳像の動き。すばるにおいての天体追尾時も同程度の移動量が予想され、全く問題無いレベルに押さえられることがわかった。