3Dによる分割主鏡シミュレータの位相差マップ計算ルーチンについて、動作検証を
行う。動作検証は、セグメントの並進・回転とアクチュエータの駆動について、それ
ぞれ単純なパターンについて計算し、別途計算されたパターンと合致するかを確認す
ることで行う。
結果として、全てのテストパターンにおいて正しいと考えられる位相差マップが得ら
れたので、実装した位相差マップ計算ルーチンは問題ないと考えられる。
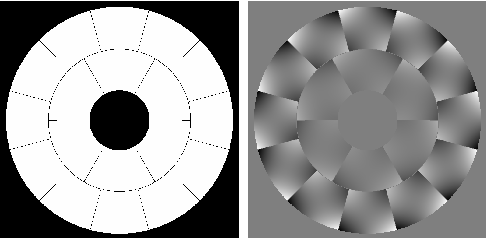
以下の位相差マップは別途明記する最大最小値の範囲内でリニアのグレース ケールで表示されている。 左は有効領域のマップ、右が位相差マップである。 位相差を導出する際のリファレンス波長は1um、鏡での反射は考慮済み。
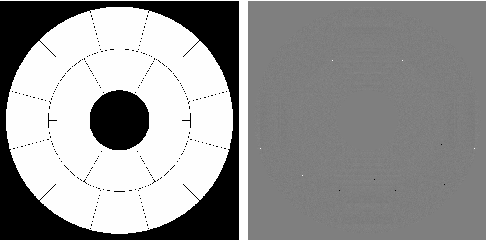
-1e-7 - +1e-7
シミュレータの計算ルーチンにおける計算誤差(ただし、定義している定数の定義
時の誤差も含む)が出力されているといえる。
ほぼランダムノイズで、ところどころのピーク値(白・黒点)が1e-7を示す程度である?
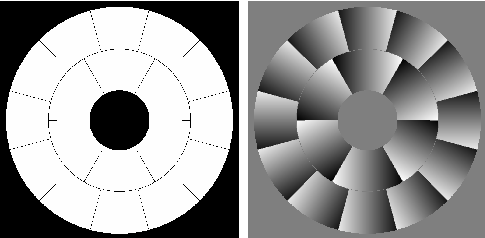
-2.34 - +2.34
内周・外周セグメント間でスムースにつながるセグメント系でのX軸座標の値のみに
依存した(Y軸に平行なコントアがでる)マップとなっている。
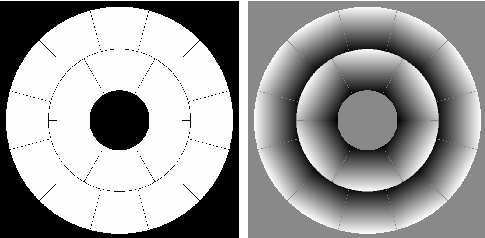
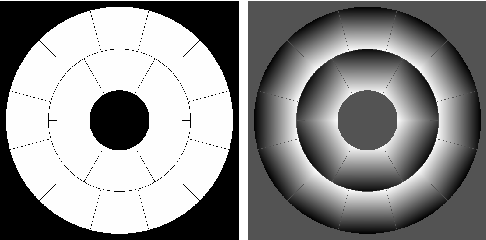
-1.62 - +1.62
セグメント系でのY軸座標の値のみに依存した(X軸に平行なコントアがでる)マップ
となっている。
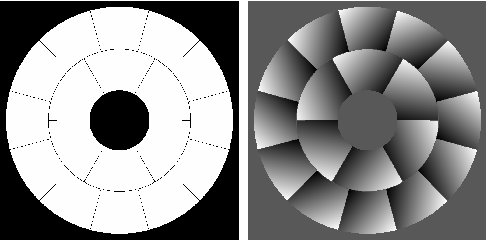
-0.318 - +0.318
四葉のクローバー型(?)の位相差マップとなり、セグメント系Y軸で対称形である。
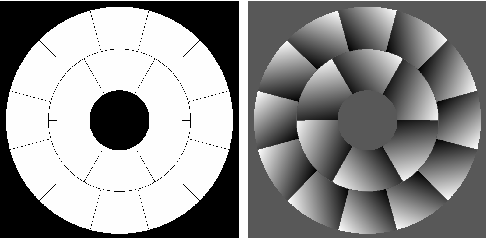
-1.59 - +3.26
3本のうち内側のみを駆動したため、Y軸方向は同じ位置にある残り2本の位置がなす
軸を中心に回転したような状況になっている。
また、3の結果をちょうど補正するような位相差マップである。
-1.84 - +3.48
5と同じく動かしていない2本の方向の縞が出現している。
-1.84 - +3.48
5と同じく動かしていない2本の方向の縞が出現しており、6とセグメント系Y軸対称
である。
-0 - +1.99
全てのアクチュエータを同じ量駆動すると全てのセグメントがアクチュエータの駆動
方向に平行移動される。このため、位相差マップは平坦に近い様子を示す。
なお、1um駆動したのに2波長分の位相差が出ていないのは、3Dシミュレータであるた
め、アクチュエータが望遠鏡主軸に対して傾いている影響が見えている。