アクチュエータの性質
主鏡位置制御に用いるリニアアクチュエータ(ハーモニックドライブシステムズ社製LAH-46-1002こちら)について、性質を調べました。
3箇所にあるアクチュエータ+非接触式センサ(シグマ光(株)製、こちら)ユニットの一つ(2番)にKeyence社のレーザー変位計LK-G10(こちら)を取付けて調査しました。
レーザー変位計は以下の写真のように取り付けています。

注:レーザー変位計には±0.2umのうなりがあります(こちら)。
以下の調査ではうなりの自己補正はかけていますが、あやふやなところがあるかもしれません。
アクチュエータの動かし方
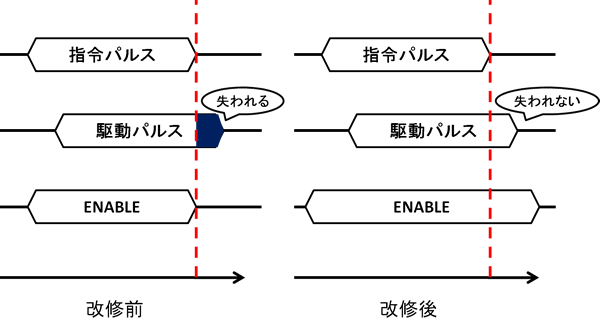 以前、アクチュエータの往復運動で元の位置に戻らない、という問題が生じていました(例えばこちら)。これは駆動パルス数に対して実際動いたパルス数が小さいという原因に起因していました。この原因はソフト上で"ENABLE"を駆動の途中でOFFにしていたことにありました。
以前、アクチュエータの往復運動で元の位置に戻らない、という問題が生じていました(例えばこちら)。これは駆動パルス数に対して実際動いたパルス数が小さいという原因に起因していました。この原因はソフト上で"ENABLE"を駆動の途中でOFFにしていたことにありました。
そこで、駆動中は常にENABLEがONになる様にソフトを改修しました。
元の位置に戻るか
アクチュエータの往復運動に対する非接触式センサの様子をみました。
を7回行いました。
10往復の代表的な様子は以下のようになりました(クリックで拡大。赤は1番の軸、緑は2番の軸、青は3番の軸、配置図はこちら)。


指令通りのパルス数駆動しているので、元の位置に戻る様になりました。
※ソフト的に正しい位置に来ているかどうかの判断は出来ないので、100パルス駆動ごとに0.5秒待って駆動しています。
左の図は初めの位置プロットした図、横軸は何往復目か(最初めは除いたので値+2をする)、縦軸は2往復目からの差。赤は1番の軸・往路、緑は2番の軸・往路、青は3番の軸・往路、紫は1番の軸・復路、茶は2番の軸・復路、シアンは3番の軸・復路。
同じ色の線が何本もあるのは7回分全てのデータを載せているからです。徐々に動いているのはセンサのドリフト(1回の測定に80分くらいかかった)、値のばたつきはセンサの読出し精度くらいだと考えられます。
ドリフトでないとしても、1回の測定内で、全体的な変化量は初めのカウント値の0.2%以下の範囲に収まっています。
以上から、往復して同じ位置に戻ってくることがわかりました。
更に、往復運動にヒステリシスがあることが改めて確認されました(3番の素性は良さそう)。
ストロークを測る
次に、レーザー変位計を用いてフルストロークの量を測定しました。
- 片道800000パルス
- 10000パルスずつ
- 3往復
を3回行いました。1回の測定時間は10分以下です。
レーザー変位計は-290[um]から950[um]まで動いたので、アクチュエータのストロークは1240[um]あるようです(2番のみ?)。
また、非接触式センサが頭打ちになる場所をみると、それぞれのアクチュエータのストロークは
- 1番:約685000
- 2番:約698000
- 3番:約706000
となりました(大体700000パルスなのでOK)。
駆動パルスの差による運動の違い
続いて、1回の駆動パルス量を変えて往復運動に差が出るか確認しました。
- 片道50000パルス
- 10000/1000パルスずつ
- 3往復
をそれぞれ行いました。(測定時間は5分以下/15分以下)
指令値通りにアクチュエータが動いているので、駆動後に充分時間を確保すれば両者は同じ様なパスを通る筈です。
結果は以下のようになりました。
赤は1番の軸・往路、緑は2番の軸・往路、青は3番の軸・往路、紫は1番の軸・復路、茶は2番の軸・復路、シアンは3番の軸・復路。
太線が10000パルスごとに動かしたとき、細い線が1000パルスごとに動かしたときの線になっています。

両者の動きに差はないようです(10000パルス毎に駆動した時のパスを補填するように1000パルス毎のパスが通っています)。
また、ここでもヒステリシスの様子が伺えます。
小さい駆動が可能か
以前は10パルスの駆動ができませんでしたが、可能になったのかを確認します。
非接触式センサのカウント値が10万以上の、分解能が高いところで10パルス駆動ができるか確認しました。
を3回行いました。

左の図は、非接初期式センサで測定しながらアクチュエータを10パルス毎動かした時の非接触式センサのカウント値の変化量を表しています。
縦軸は、初めのカウント値との差、横軸は読み出し回数です。
赤は1番の軸、緑は2番の軸、青は3番の軸を表し、線の太さはテストした回数の違いで、線が細い順に行っています。
1の位が0のときに10パルス駆動を行いましたが、それに応じてカウント値が増えています。3番のアクチュエータはは1番応答が良く、5パルスでも同様の変化を見せました(1パルスでは有意な変化は見られなかった)。
また、1番のアクチュエータで時々大きく動いています(アクチュエータにがたがある?)。
非接触式センサは必要か
以上のことから、アクチュエータのENABLEを駆動時に常にONとすることで振舞いがかなり改善されました。
指令通りに駆動するならば非接触式センサは要らないのでは、と考えられます。
しかし、往復運動にヒステリシスがあることと、位置較正センサがない場合、送ったパルス数をどこかに記憶しておく必要があるということから非接触式センサはあった方が良いと考えられます。
back to index
back to Home Page
