about Adaptive Optics
とりあえず、AOについてまとめます。文字通りアバウトにですが…
AOの基本概念
光源から来た光の波面は、望遠鏡に入射するまでに、通過してくる大気によって形が崩れます。
AO(Adaptive Optics:補償光学)は、その崩れた波面を元に戻す光学系です。AOの基本構造は簡単にかくと以下の図の様になります。(クリックで拡大)
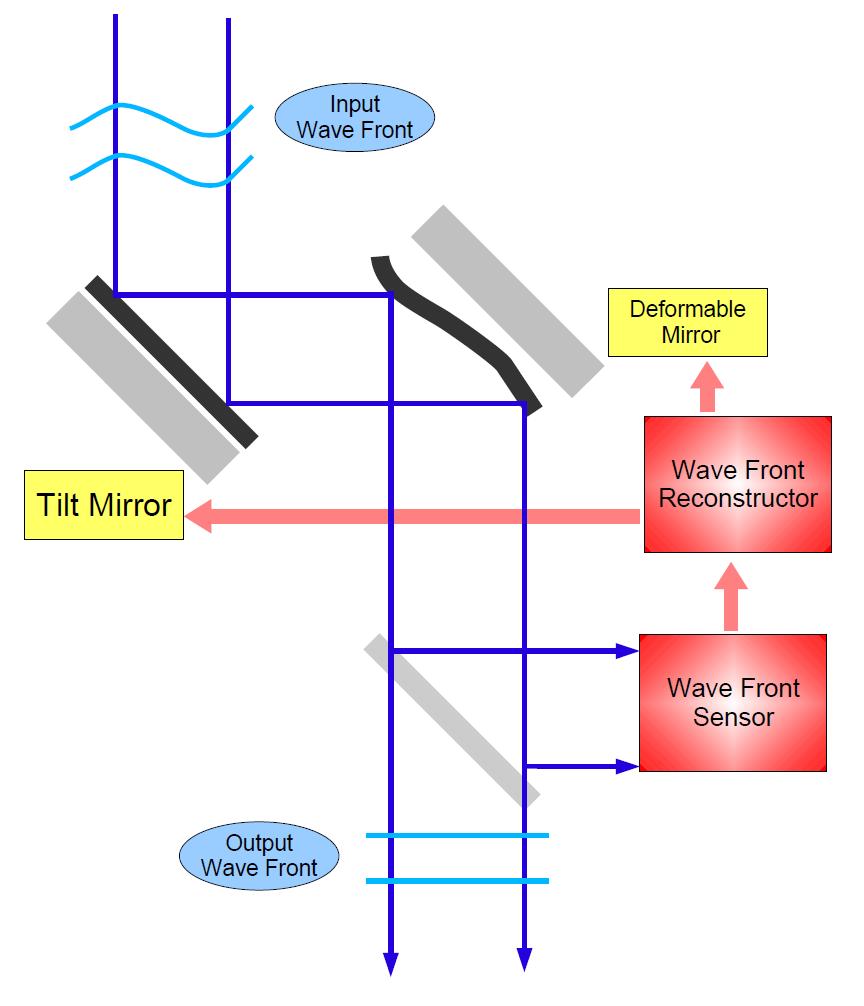
まず、入射した波面はハーフミラーを通り、波面センサー(Wave Front sensor)に入ります。
波面センサーで、波面のずれ(位相のずれや、入射方向のずれ)を計測し、それを傾きを制御する鏡(Tilt Mirror) と位相を制御する鏡(Deformable Mirror:可変鏡)にフィードバックをかけます。
フィードバックをかけた波面は更に波面センサーにも入射するので、何回もフィードバックをかけることで、波面の崩れを直していきます
詳しいことは後述していきます。
波面センサーについて
AOで重要な一要素である波面センサーは、リアルタイムに天体からの波面を測る部分になります。波面センサーの主な手法を3つ、簡単に紹介します。
The lateral shearing interferometer
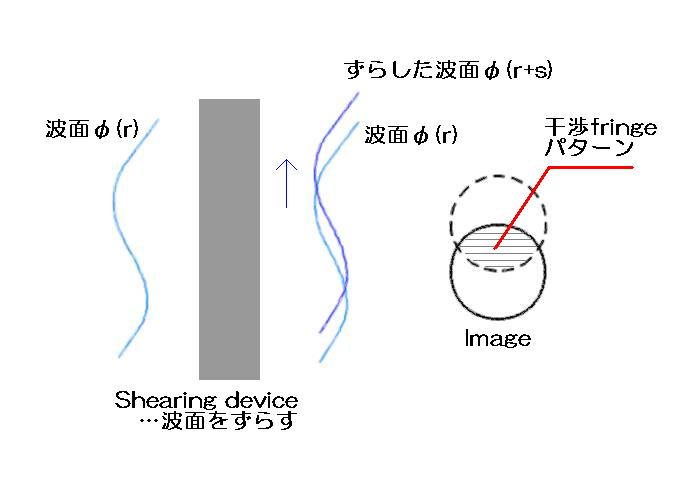 The lateral shearing interferometer (LSI)は右図のような概念で表される波面センサーです。
The lateral shearing interferometer (LSI)は右図のような概念で表される波面センサーです。
入射した波面は、“shearing device”と呼ばれる部分で2つに分けられ、その内一方はsだけずらされて結像します。その為、できる像は干渉パターンになっています。このパターンから波面の位相を調べるのがLSIの原理です。
The Shack-Hartmann wave-front sensor
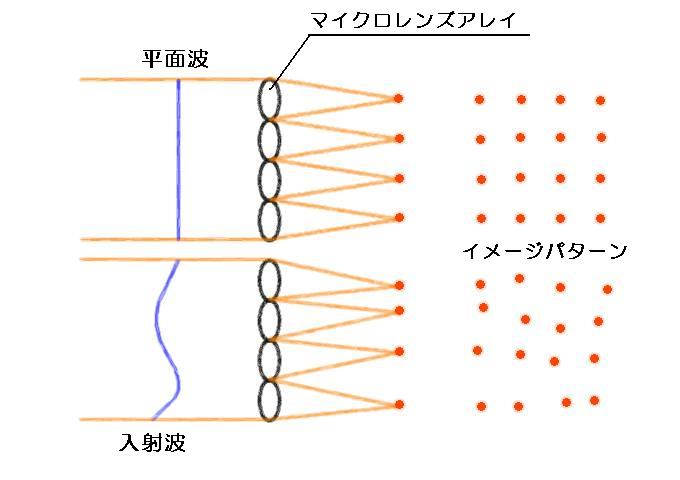 The Shack-Hartmann wave-front sensor は、右図のように、瞳の後ろにマイクロレンズアレイ(小さいレンズを沢山並べたもの)を置いてその結合像で波面を測ります。
The Shack-Hartmann wave-front sensor は、右図のように、瞳の後ろにマイクロレンズアレイ(小さいレンズを沢山並べたもの)を置いてその結合像で波面を測ります。
理想的な平面波の場合(右図の上)、結合した像は縦横きれいに並びますが、大気などで波面が揺らぐと、それぞれのレンズを通った光が、理想的な位置からずれて結合します(右図下)。このずれを測定することで、波面を測ります。
また、望遠鏡の鏡の形状(歪みなど)を測る時にもこれを用いたりします。
The curvature sensor
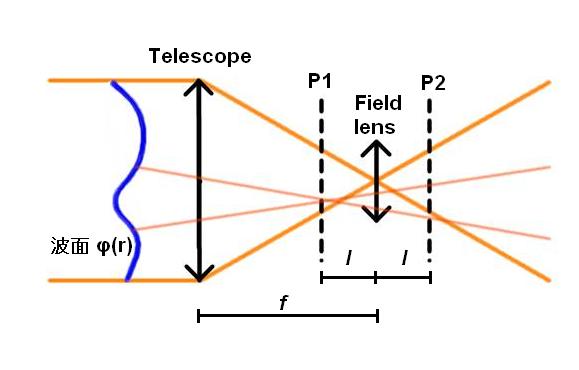 The curvature sensor は右図のように、瞳の結合面からずらした2つの面の像を見て波面を測るセンサーです。
The curvature sensor は右図のように、瞳の結合面からずらした2つの面の像を見て波面を測るセンサーです。
2つの結合面は瞳の結合面から同じ距離に前進、又は後退した位置に置いています(理想的な波面では、2つの面で同じ様にぼやけた(defocus した)像が得られます)。右図のような場合、前進側の方がより強く、後退した側の方がよりぼやけて見えるので、この見え方から波面の位相を測るものになっています。
瞳の広がりとできる像の関係
瞳における波面とPSF(Point Spread Function)には以下のような関係があります。
まず、望遠鏡の瞳における波面の広がり(瞳関数)Sは以下のように表せます。

ここで、
 、
、
となっています。このとき、OTF(Optical Transfer Function)と呼ばれる関数はSを用いて、

と表せます。「*」は相関を表す演算記号で、

のことです。PSFは、OTFのFourier 変換したもの、つまり、

であるので、相関をFoerier 変換すると、
のようにできることから、瞳関数からPSFを求めるには、結局、瞳関数をFourier 変換して、そのAmplitude を2乗すればよいことになります。
back to Home of AOsim
back to Home
