●概要
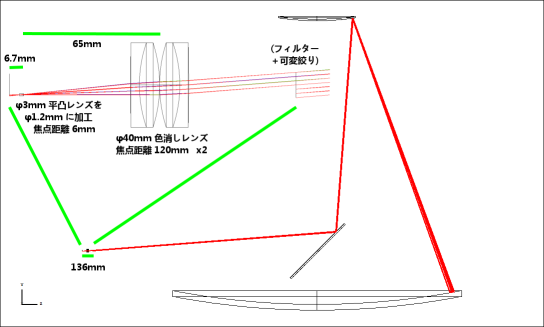
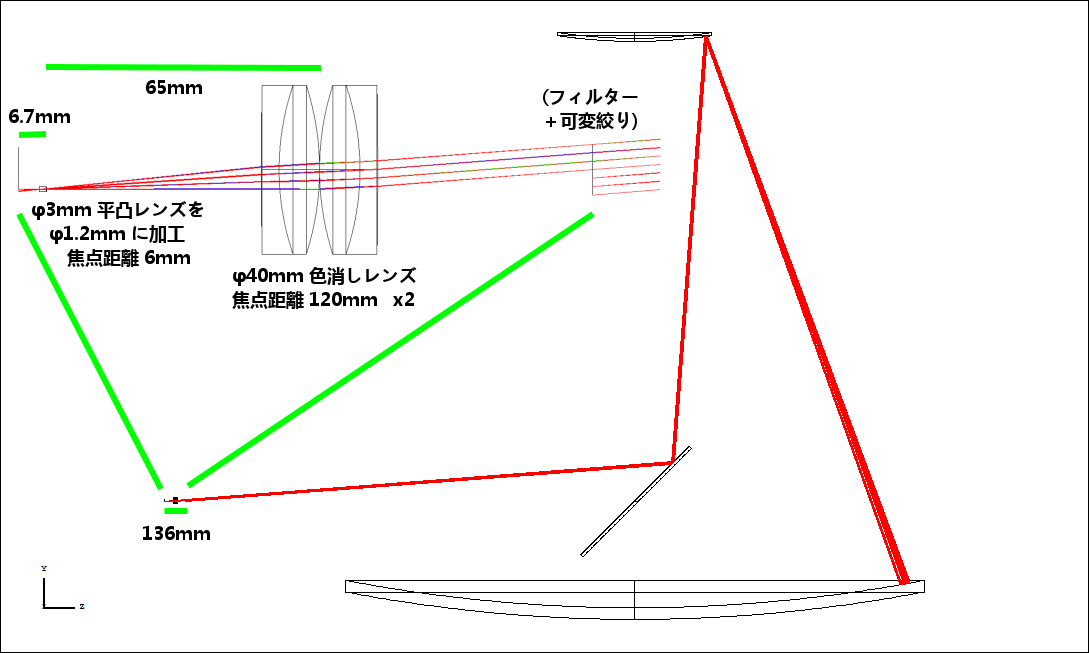
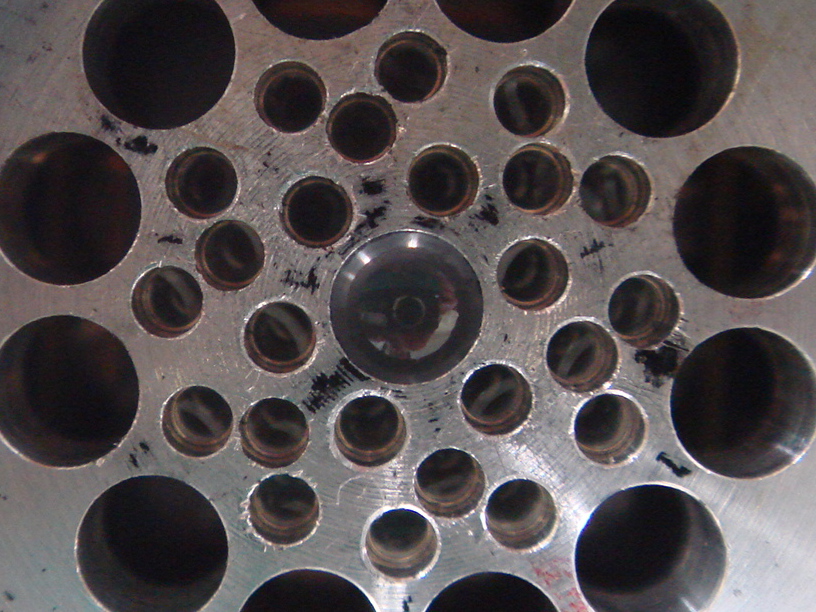
- 光学系
焦点面から3種類のレーザー光をファイバーで導入し、主鏡全体を照射
セグメント境界上に配置したハーフミラーで、空に戻る光を焦点面に戻す
レンズで主鏡像をつくり、マイクロレンズで各ハーフミラーを通った光を結像させる
3種のレーザーの干渉縞からセグメント間の段差を計測
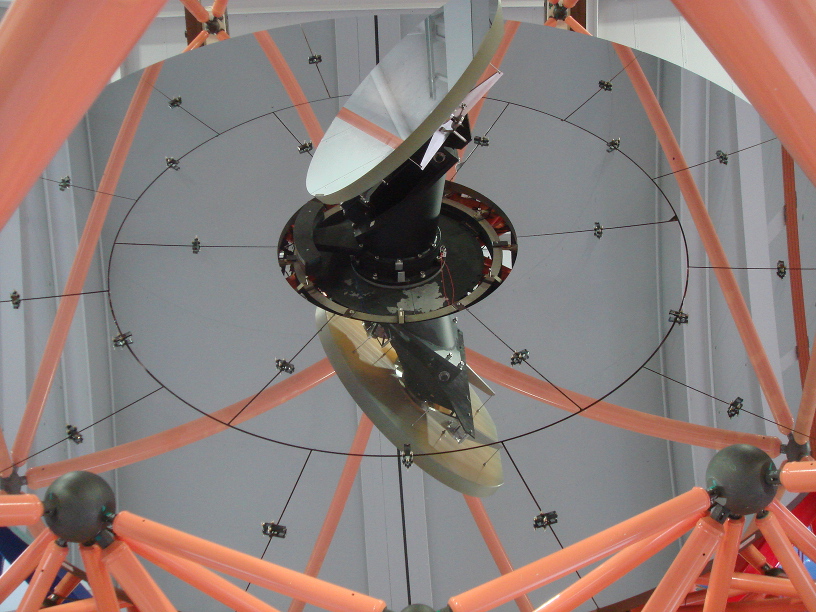
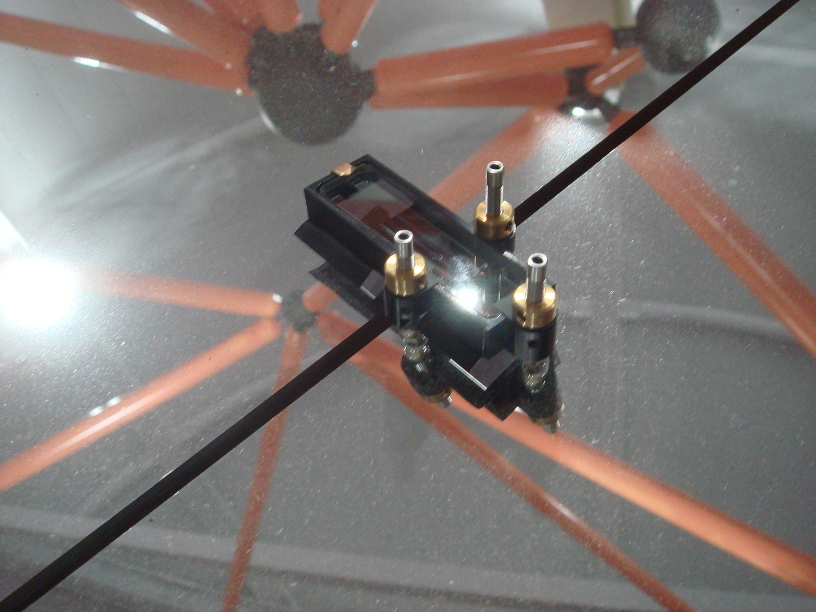
- ハーフミラー
主鏡上の24箇所に配置(主鏡面積の0.34%)、調整用のレーザーを用いて反射の向きを調整



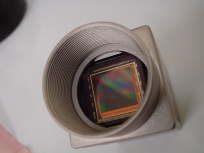
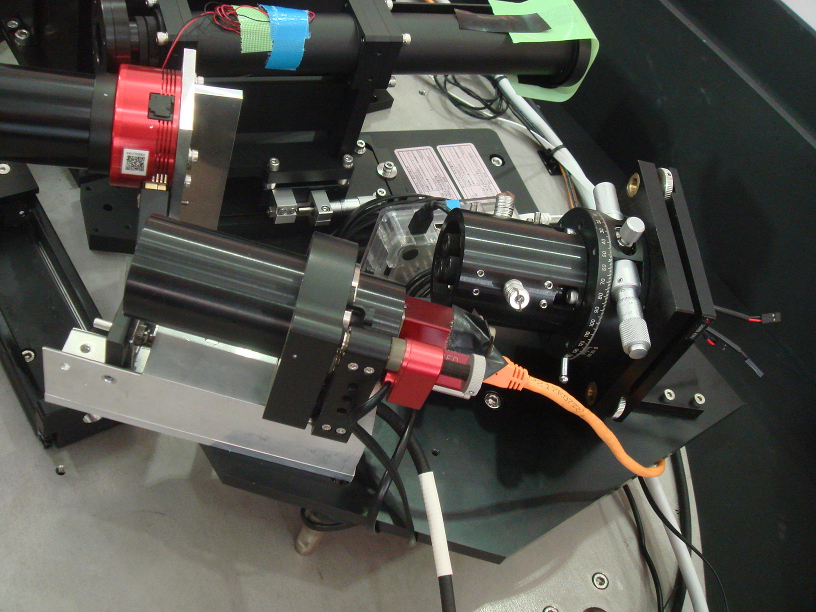
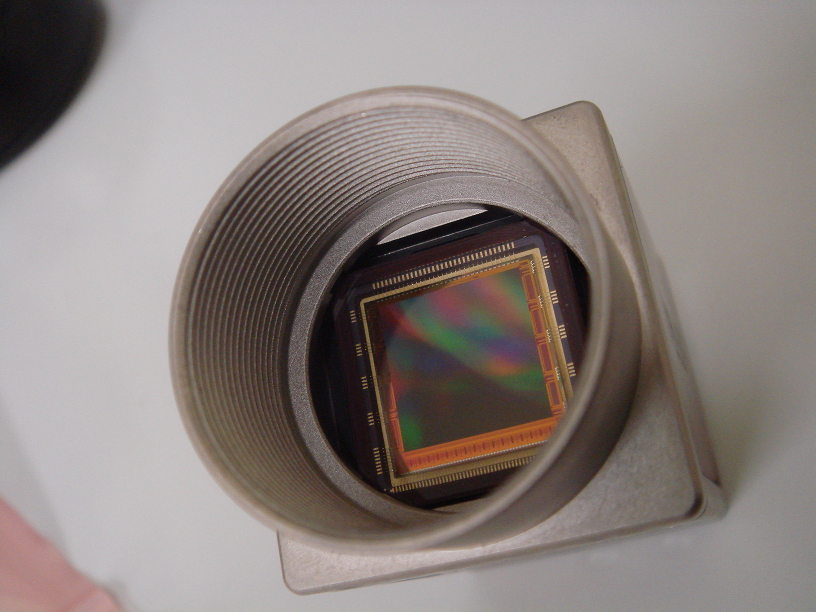
- カメラユニット
コリメータレンズ + マイクロレンズ x24 + 2k x 2k CMOS カメラ
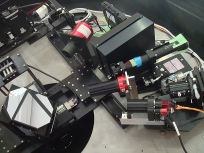

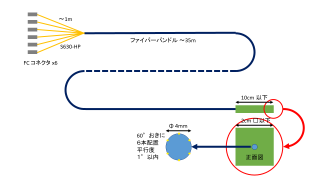
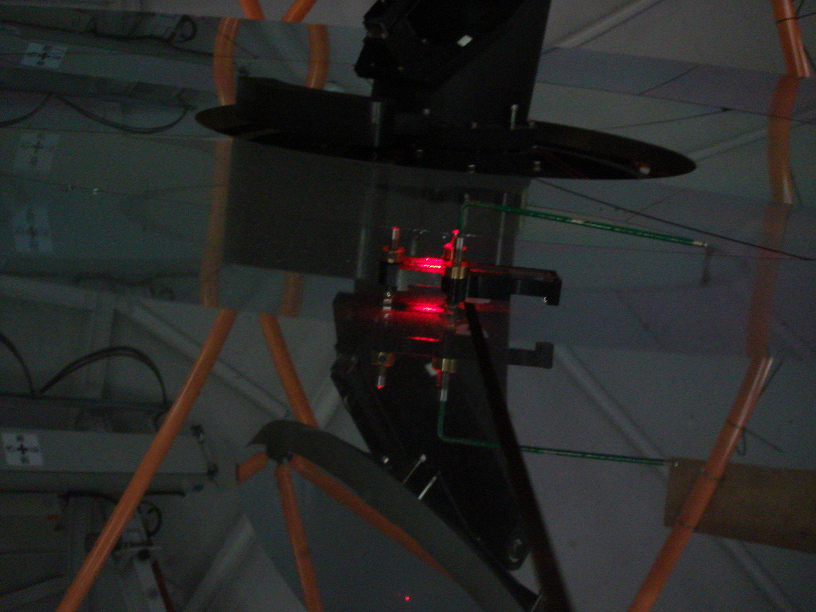
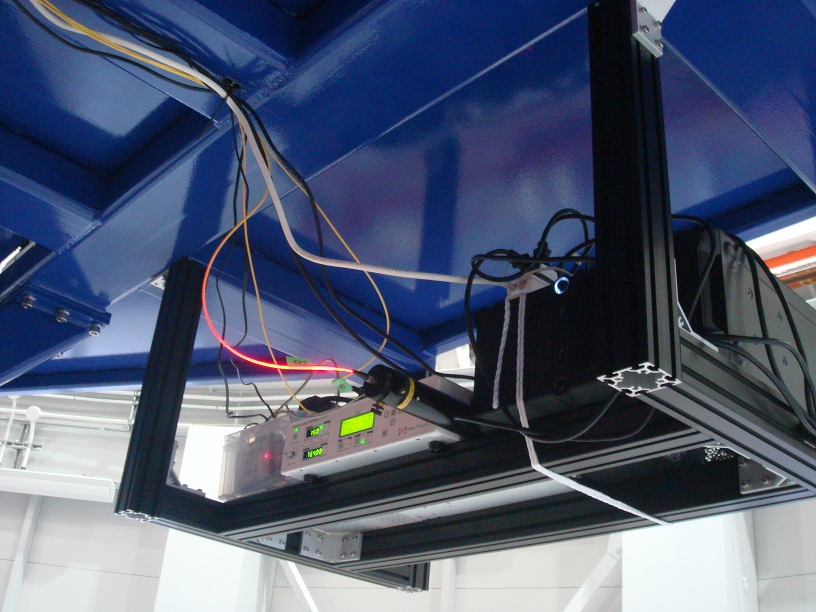
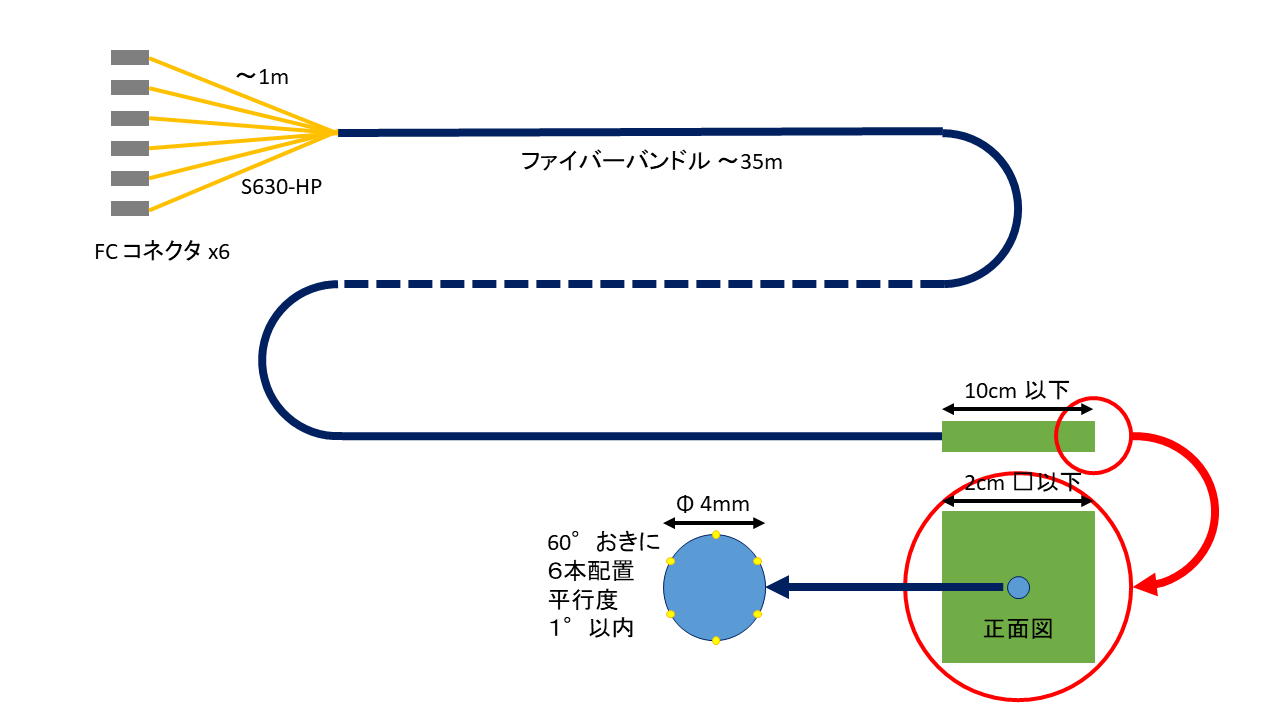
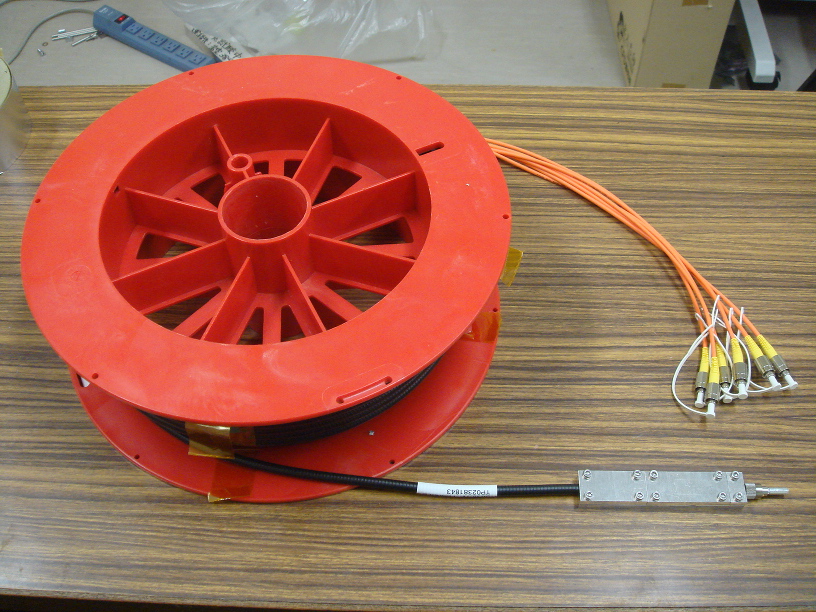
- 光源ユニット + ファイバーバンドル
3種のレーザー(808nm, 765-781nm 可変, 633nm) の電源ユニット。
下の写真はナスミス台下に吊り下げていた時のものだが現在は2階。


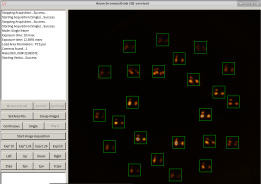
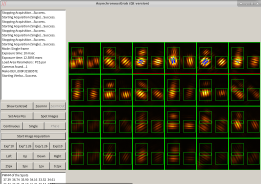
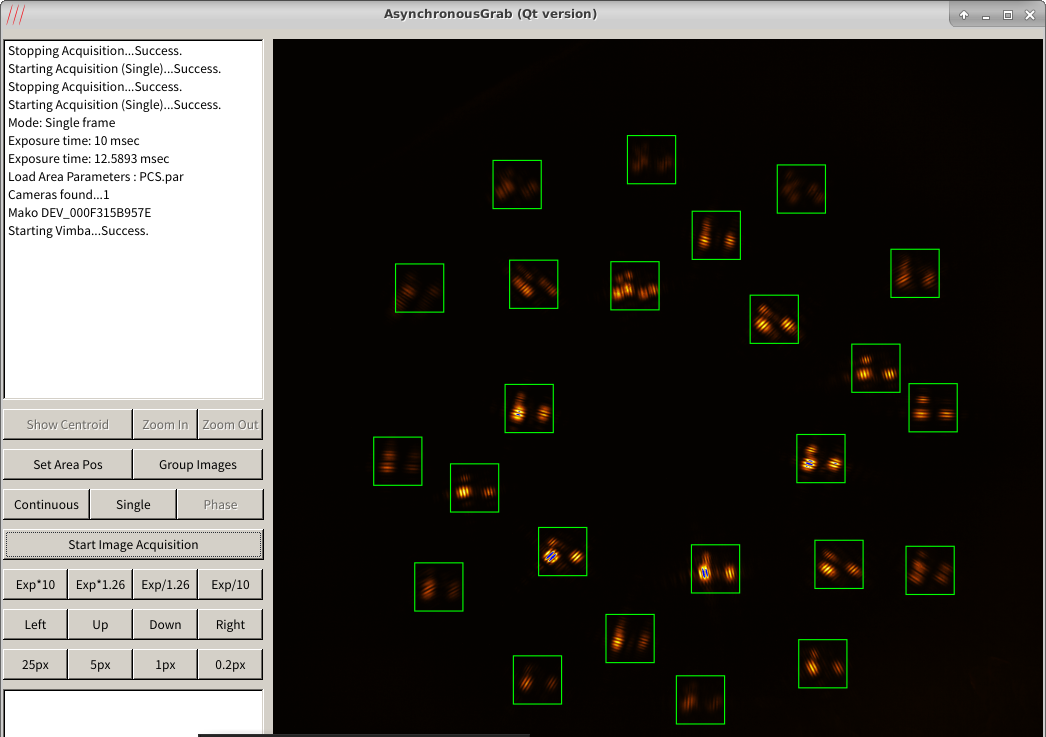
- 計測の様子
下左:全体のイメージ
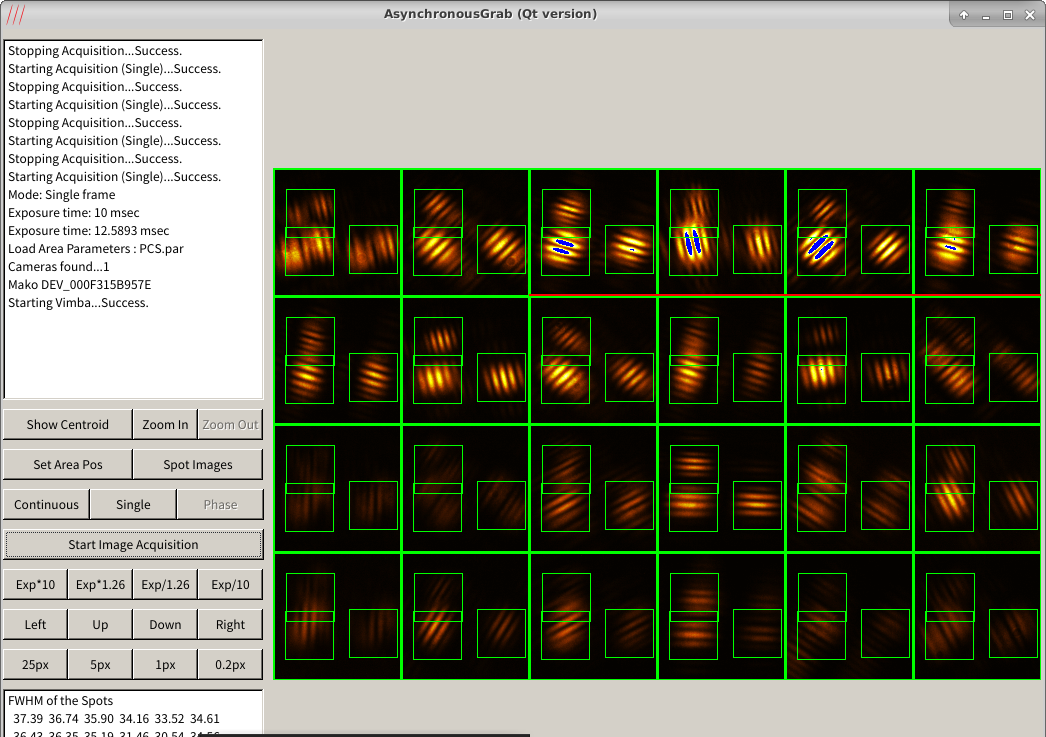
下中:個々のハーフミラー毎に切り出したもの
下右:計測中の3つのレーザーの干渉縞の様子(縞の移動は波長スキャンによるもの)
●現在の状況
●今後は...
- セグメント間の位相合わせ
実はここまでの測定では、最も波長の短い He-Ne レーザー(633nm)の情報を全く使っておらず、安定化ダイオードレーザー(808nm) に対するチューナブルレーザー(765-781nm)の相対的な変化のみを用いて結果を出している。段差が揃ってくれば He-Ne レーザーの情報も併せて 100nm 以下の位相差計測結果が出せる予定。
そのためには、上記 segment 間の段差がアクチュエータの可動域内に入っている必要があるが、この調整はかなり大変そう...
- 誰でも使える状態にできるか?
PCS のハーフミラーは、鏡面に接着された微小Vブロックにネオジム磁石球でくっつけて固定している。接触点が5μm 動くと計測スポットが隣のスポットにかなり接近するほど動くため、日々の温度変化や振動の影響でスポットが移動し、どのスポットがどこにあるかの判別を自動で行うことが難しい。計測スポットの配置パターンと干渉縞の向きからある程度の自動スポットサーチも可能なので、まずはその機能を考えるところからかな...
|



{kind=link}