●これまでの開発経緯
●段差計測その5
その後、SH のログ解析によりセンサアームからのセンサ剥離など、色々発見されて解決されたので、再度ハーフミラーの調整をして段差計測を行った。しかし、今回は第3鏡の回転モータのドライバに電源トラブルが発生しかかっている状態で、数分おきに第3鏡が微小回転して元に戻るという動きを繰り返し、かなり不安定な状態だったが、何とかエラーを出さずに何らかの結果は出し続けたようだ(視野外に出ている間の干渉縞の情報は、測定中に予想値で埋めて接続する部分がうまく機能した感じ)。計測はチューナブルレーザーのスキャン速度 slow と normal 各10回ずつを1セットとし、6セットを計測した。始めは露出時間が長めの設定で、内周の干渉縞はかなりサチっている状態で始め、最終的にはややサチっている程度まで露出時間を減らした。また、最後の2セットは望遠鏡のドライバラックの電源を落として計測した。また、1,4,5 セット目は主鏡制御 ON の状態で計測している。
今回は、第3鏡以外の状態は安定しており、主鏡制御 ON/OFF に関係なく計測できた。また、画像はかなりサチっていても谷の部分さえ確認できれば位相計測に支障はないようだ。
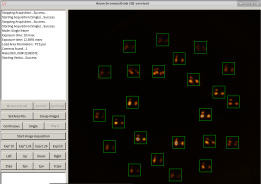
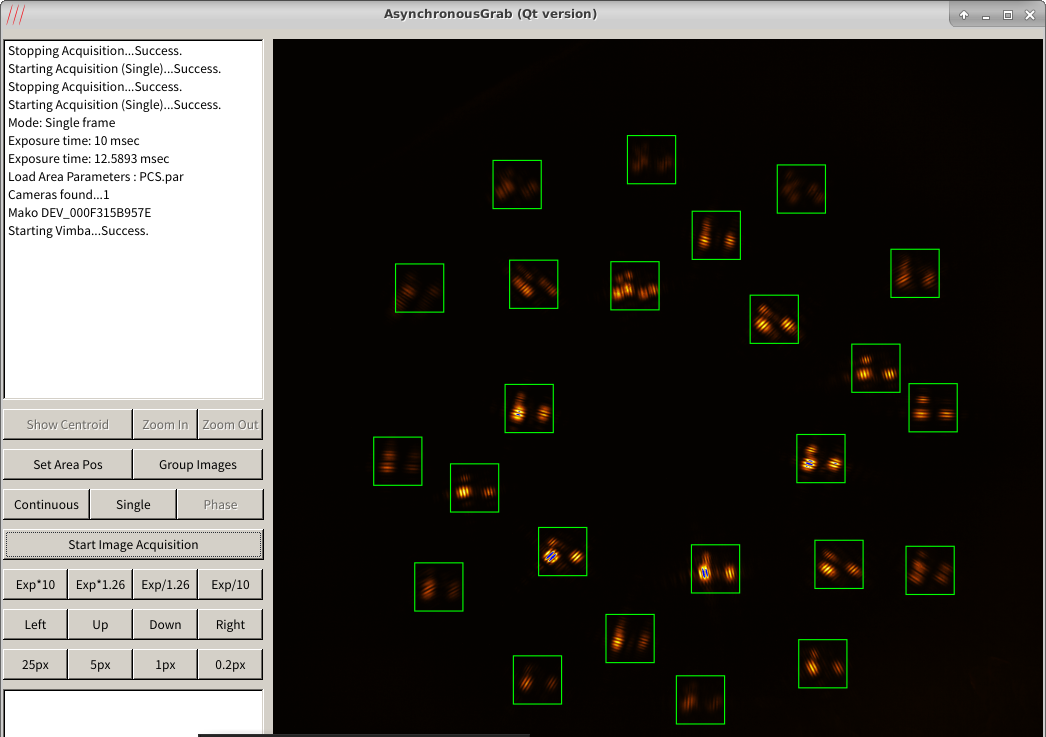
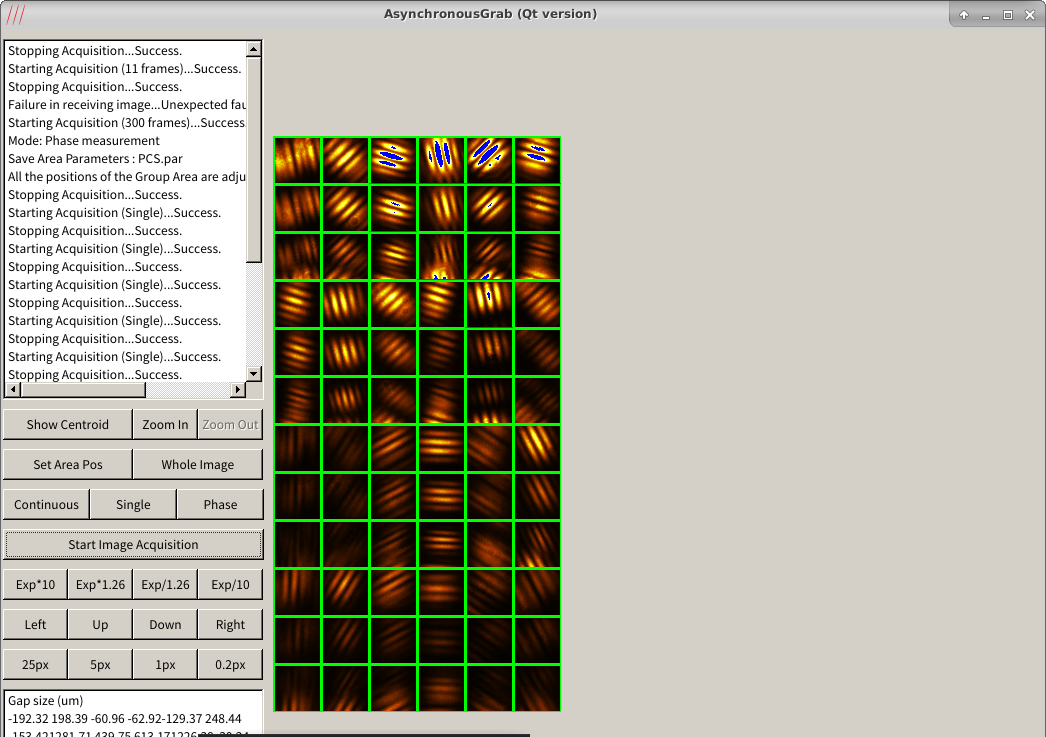
最後の状態でのスポットの様子は以下の通り。
最後2セットでの2σクリッピング平均値は以下の通り。
| 1 | -192.4 | 7 | -149.8 | 13 | -344.3 | 19 | -276.2 |
|---|
| 2 | 198.7 | 8 | -419.3 | 14 | 434.8 | 20 | -94.9 |
|---|
| 3 | -61.1 | 9 | -265.9 | 15 | 32.0 | 21 | 19.3 |
|---|
| 4 | -63.0 | 10 | -305.2 | 16 | -372.3 | 22 | -55.7 |
|---|
| 5 | -129.2 | 11 | -358.9 | 17 | 153.8 | 23 | -81.4 |
|---|
| 6 | 250.4 | 12 | 30.2 | 18 | 253.4 | 24 | 333.0 |
|---|
上記の結果から、各セグメントの高さ18個を変数とする25個の連立方程式ができる(全体の平均を0とする条件を追加)ので、疑似逆行列を用いて解いてみる。
| 1 | 280.9 | 7 | 130.4 | 13 | -96.2 |
|---|
| 2 | 88.2 | 8 | -214.3 | 14 | -372.7 |
|---|
| 3 | 338.5 | 9 | 118.3 | 15 | -119.5 |
|---|
| 4 | 208.9 | 10 | 36.2 | 16 | 35.0 |
|---|
| 5 | 145.5 | 11 | -20.0 | 17 | -336.7 |
|---|
| 6 | 83.1 | 12 | -1.1 | 18 | -304.5 |
|---|
この解から得られるセグメント間の段差と実際の計測値との差は以下の通り。前回の計測では状態が悪く信用できない結果だったが、今回の結果は大丈夫そう。
| 1 | 0.27 | 7 | 0.63 | 13 | 0.42 | 19 | 0.24 |
|---|
| 2 | 0.89 | 8 | 0.43 | 14 | -0.21 | 20 | 0.30 |
|---|
| 3 | 1.32 | 9 | -0.87 | 15 | -0.21 | 21 | 0.30 |
|---|
| 4 | 0.44 | 10 | -0.05 | 16 | -0.63 | 22 | 0.60 |
|---|
| 5 | 0.39 | 11 | -0.31 | 17 | -0.63 | 23 | 0.60 |
|---|
| 6 | 0.09 | 12 | 0.18 | 18 | 0.24 | 24 | 0.42 |
|---|
●段差計測その6
第3鏡の切り替えモーターが故障し、その間手動での第3鏡切り替えを行っていたが、切り替えの際の位置再現性によりハーフミラーが一斉にずれたような状態となってしまったため、第3鏡のモーターが復旧するまでは作業は中断していた。モーター交換後、ほぼ1年ぶりにハーフミラーの調整と計測を行おうとしたが、作業日はドーム見学とバッティングしたため計測を行う時間が取れず、同日晩は観測者が晴れ待ち、翌日昼は望遠鏡初期化の際に謎の Az 暴走が発生したため、結局、計測が行えたのは調整後5日経過してからだった。途中、主鏡の圧縮空気での清掃が入っており、これが原因かどうかはわからないが 12番のスポットが視野外となっていた。1〜2ヶ所程度であれば、自由度の剰余分でカバーできるため、とりあえずはこのまま計測してみた。
ドーム内シーイングは最悪でかなりゆらゆらしていたが、計測結果はまずまず安定している感じだ。初回の slow scan のみ主鏡制御 ON で、その他は計測直前に10秒間程度だけ ON して計測中は OFF している。nomal よりも slow で計測値の絶対値が少しだけ大きく出る傾向がある感じだが、最終的には大きい段差はなくなるはずなので、細かくは追求しないことにする。
| 1 | -278.5 | 7 | -283.9 | 13 | -334.7 | 19 | -254.5 |
|---|
| 2 | 103.4 | 8 | -490.5 | 14 | 342.7 | 20 | -167.0 |
|---|
| 3 | -92.3 | 9 | -409.1 | 15 | -30.8 | 21 | 105.9 |
|---|
| 4 | 34.4 | 10 | -406.9 | 16 | -347.1 | 22 | 76.0 |
|---|
| 5 | -114.0 | 11 | -460.2 | 17 | 166.1 | 23 | -21.5 |
|---|
| 6 | 345.5 | 12 | --- | 18 | 288.8 | 24 | 168.4 |
|---|
上記の結果から、各セグメントの高さ18個を変数とする24個の連立方程式ができる(全体の平均を0とする条件を追加)ので、疑似逆行列を用いて解いてみる。
| 1 | 329.1 | 7 | 45.5 | 13 | -124.1 |
|---|
| 2 | 50.8 | 8 | -288.6 | 14 | -378.5 |
|---|
| 3 | 396.6 | 9 | -119.5 | 15 | -89.5 |
|---|
| 4 | 283.0 | 10 | -140.4 | 16 | 78.4 |
|---|
| 5 | 318.1 | 11 | -63.8 | 17 | -267.0 |
|---|
| 6 | 225.0 | 12 | 42.5 | 18 | -297.5 |
|---|
この解から得られるセグメント間の段差と実際の計測値との差は以下の通り。
| 1 | 0.29 | 7 | 0.33 | 13 | 0.61 | 19 | 0.20 |
|---|
| 2 | 0.61 | 8 | -1.46 | 14 | 0.28 | 20 | 0.41 |
|---|
| 3 | -0.84 | 9 | 1.54 | 15 | 0.28 | 21 | 0.41 |
|---|
| 4 | 0.70 | 10 | -0.21 | 16 | 1.74 | 22 | 0.61 |
|---|
| 5 | 0.48 | 11 | -0.20 | 17 | 1.74 | 23 | 0.61 |
|---|
| 6 | 0.29 | 12 | --- | 18 | 0.20 | 24 | 0.61 |
|---|
slow と normal での結果の違いが見られる 17,20,24 を slow で計測した結果の方で置き換えて計算してみた場合の結果は以下の通り。全体的に凹凸は減った感じだが、まあ似たような状況。
| 1 | 0.32 | 7 | 0.41 | 13 | 0.58 | 19 | 0.23 |
|---|
| 2 | 0.73 | 8 | -1.02 | 14 | 0.16 | 20 | 1.13 |
|---|
| 3 | -0.29 | 9 | 0.95 | 15 | 0.16 | 21 | 1.13 |
|---|
| 4 | 0.66 | 10 | -0.90 | 16 | 1.19 | 22 | 0.58 |
|---|
| 5 | -0.23 | 11 | 0.55 | 17 | 1.19 | 23 | 0.58 |
|---|
| 6 | 0.32 | 12 | --- | 18 | 0.23 | 24 | 0.58 |
|---|
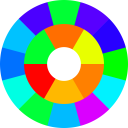
これまで4回の計測を行ったが、毎回の各セグメントの高さを色分けしたものが以下(-400,-240,-80,80,240,400μm)。大体1年おきに計測しているが、問題なく計測できていることが確認できた。2番目と3番目の間の変化が大きいのは、この間に多くのセグメントの固定点の接着が剥離し、再接着が行われたためと考えられる。下図と各セグメント番号との対応はこれ。
 |
 |
 |
 |
| 2019/12/17 |
2021/04/06 |
2022/07/20 |
2023/06/19 |
●計測値と主鏡制御プログラムの+方向確認
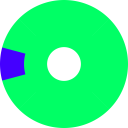
位相カメラで計測された+の値が、主鏡制御ソフトの+方向と同じなのか逆なのかを確認するため、外周セグメントの1つ(segment #10)の z 制御の目標値を -30μm 変化させて位相カメラの出力がどうなるか確認した。上記計測から更に4日経過し、5番と20番のスポットがかなり接近、更にネットワークが重く頻繁にカメラ画像が途絶える状況の中計測を行った。動かすセグメントは位相カメラの計測段差が 200μm 以下で normal scan での計測ができるもの、かつできれば3つの測定点がある外周セグメントが望ましく、segment #11 がそれに適合していたが、segment #7,#11,#15 はソフト上の固定点で上下移動ができないため、segment #10 を動かすことにした。また、z 移動量が 100μm になると分裂するスポットも出始めたため、移動量は 30μm とし、接近している 5番と20番 が更に接近しない方向に z 移動させた。計測はこれまで通り slow と normal の各10回で1セットとし、現在の状態、segment #10 の制御目標位置を -30μm ずらし、最後にもとに戻して計測、の3セット行った。
seg#10 -30μm 元の状態
結構ひどい状態だが4日前の状態をほぼ維持していることと、segment #10 が下がると 22番(segment #10 側に脚がある)が増えて 23番(隣側に脚がある)が減るという事がわかった。これは即ち、ハーフミラーの脚が付いている側から見て、反対側のセグメントが高ければ+になるということのようだ。図での確認のため、22番を+30μm、23番を-30μm だけ4日前の計測値をずらして同様に plot してみたのが以下。これにより、各セグメントの高さとして計算された値は上方向が+となっていることも確認できた(図の配置と PCS 画像上での配置はセグメントを裏から見た配置となっていることに注意)。
|
 |
 |
| 2023/06/19 |
seg#10 -30μm |
変化量(10倍表示) |
●段差計測その7
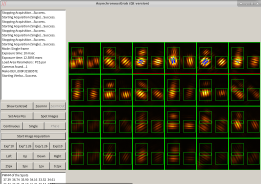
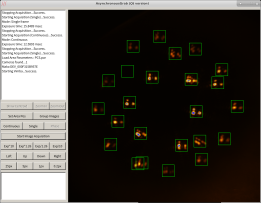
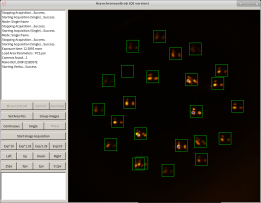
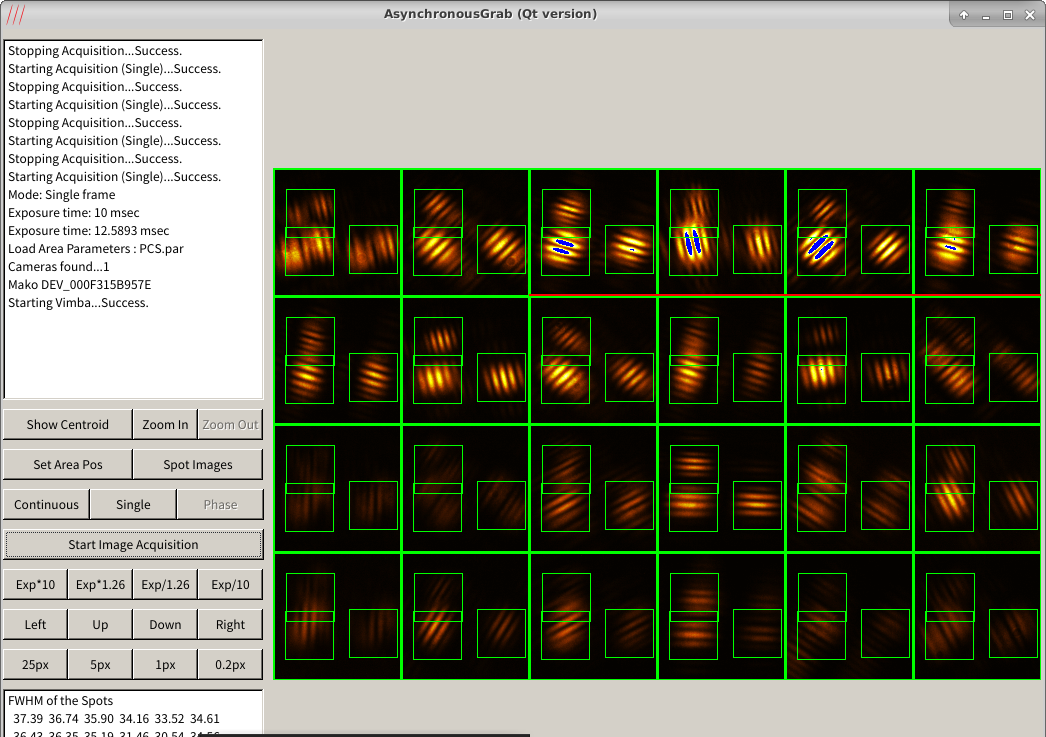
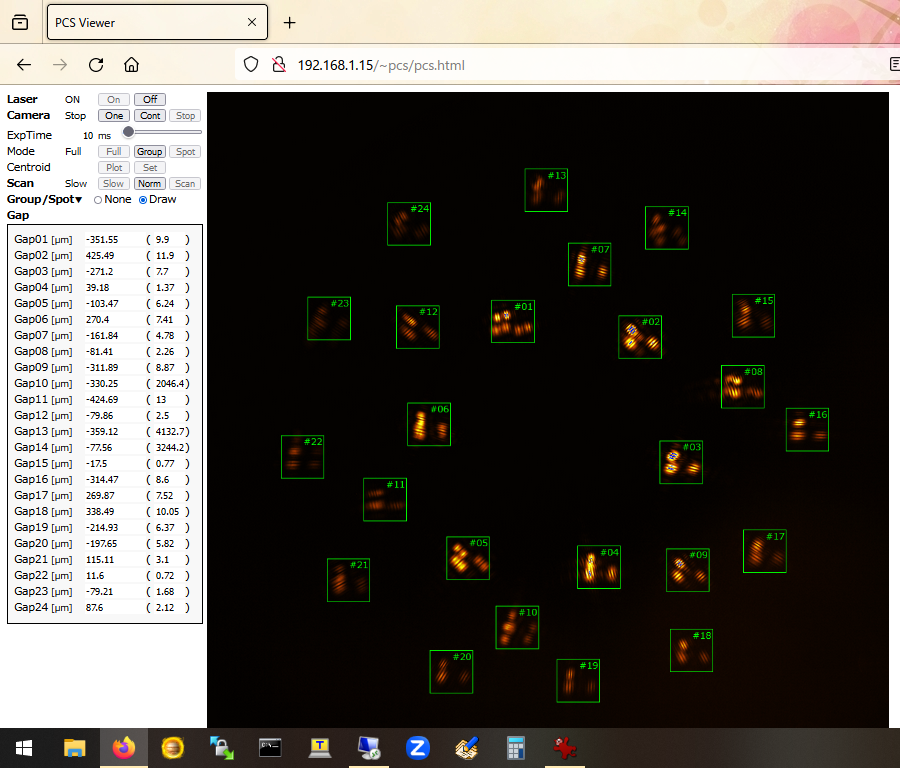
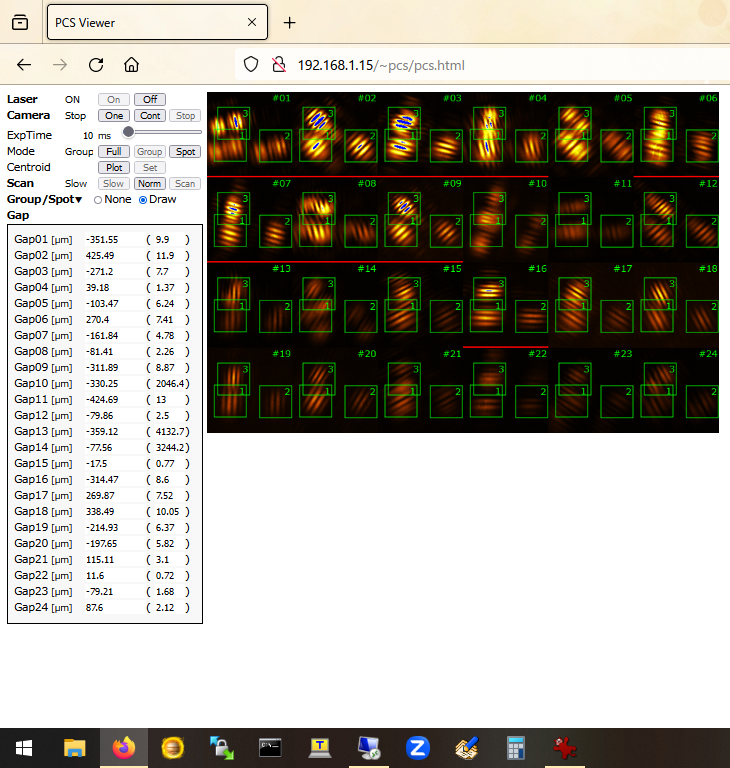
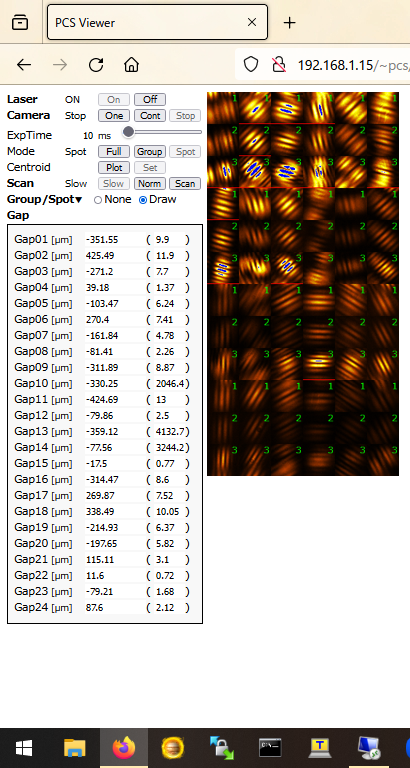
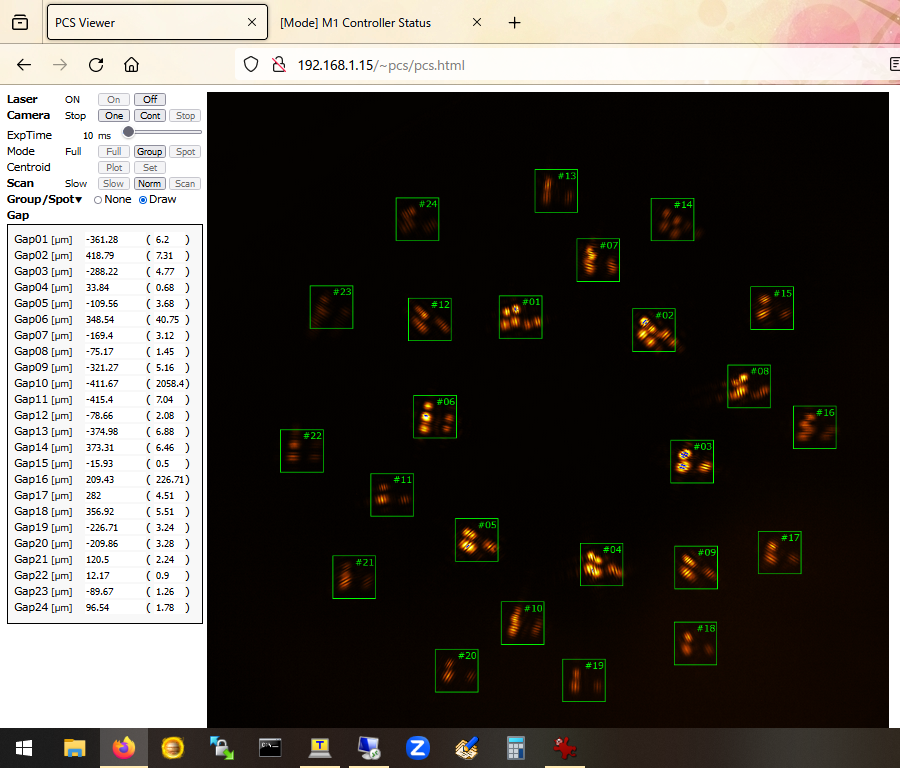
ZWO の javascript を参考に PCS の Web インターフェースを準備した。
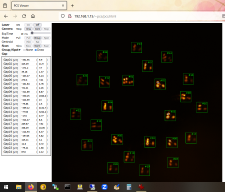


Full モード Group モード Spot モード
裏で画像更新の監視用の cgi が走るようになったためか、PC が更に遅くなって12fps の周期内で解析できなくなったため、解析後に次フレームを要求することにした(これまでは先にフレーム要求してから解析していた)。動作は安定したが、サンプル数が半分になったので、それぞれのモードでの測定レンジも半分になった(計測時間を1分にすればこれまでの計測レンジが確保できるが、さすがに1分は長い)。計測の合間に、途中で1点モード SH を行いスポットを揃えたが、結構スポットが重ならないものが多い(上図は SH 後のもので、SH 前の画像はこれ。)。
副鏡 X,Y の値は初期化操作が無いので値が望遠鏡起動の度にずれていくとのことで、副鏡 X,Y の初期化動作と、初期位置(-4183,+157) にしたら PCS 上でスポットが PFS 2個分程度移動した。スポット位置から判断すると初期化動作前は(-4400,0)付近にあったようだが、微小量なので従来の初期位置にしておき、PCS 側で計測点を動かすことで対応した。
その後、EL=60°でも測定、副鏡 X,Y のずれは2年前の計測結果が適用できた。
計測結果は以下の通り。各状態10回ずつの連続計測で、slow スキャンモードで主鏡制御なし/あり、normal スキャンモードで主鏡制御なし/あり、1点モード SH でのセグメント向き調整の後再度同じ計測、最後に EL=60° にして主鏡制御ありの状態で slow/normal スキャンモードでの測定、の順。一番最後の計測中に Web 観望会の準備が始まって zoom 中継テストなどが入ったため、カメラからの画像受信がほぼできない状態になり、最後の6つのデータはほぼ同じ値の繰り返しとなってしまっている。
測定レンジ減少のため、ほぼ全てのスポットが slow スキャンモードでしか計測できない状態となってしまった。また、主鏡制御は天頂方向では結構ブルっていたので、主鏡制御 OFF の方が安定している。しかし、EL=60° ではなぜか安定し、主鏡制御 ON のままでも安定した結果が得られている。8番と12番の結果から、slow スキャンモードの結果は normal モードの 1.0325 倍となっていることがわかったので(サンプル間隔が変わってこれまでの補正が過補正気味となったようだ)補正ファクターを 0.93228 から 0.96258 に変更することにする。
この補正ファクターで slow スキャンモードの結果を修正して安定していた EL=60° での測定結果を用いてセグメントの位置を計算する。normal で計測できているものはそちらの結果を用いるが、最後の6回は計測できていないので使えるデータは4個のみ。
| 1 | -344.3 | 7 | -162.2 | 13 | -353.3 | 19 | -217.2 |
|---|
| 2 | 422.7 | 8 | -80.4 | 14 | 352.4 | 20 | -197.9 |
|---|
| 3 | -263.8 | 9 | -304.2 | 15 | -17.5 | 21 | 115.7 |
|---|
| 4 | 38.6 | 10 | -390.9 | 16 | -305.0 | 22 | 11.7 |
|---|
| 5 | -110.1 | 11 | -416.9 | 17 | 264.3 | 23 | -83.7 |
|---|
| 6 | 261.5 | 12 | -79.5 | 18 | 332.1 | 24 | 92.7 |
|---|
上記の結果から、各セグメントの高さ18個を変数とする25個の連立方程式ができる(全体の平均を0とする条件を追加)ので、疑似逆行列を用いて解いてみる。
| 1 | 374.8 | 7 | 211.1 | 13 | -206.2 |
|---|
| 2 | 30.4 | 8 | -142.3 | 14 | -421.2 |
|---|
| 3 | 292.6 | 9 | -49.8 | 15 | -87.0 |
|---|
| 4 | 182.4 | 10 | -134.4 | 16 | 178.0 |
|---|
| 5 | 218.5 | 11 | -123.6 | 17 | -126.3 |
|---|
| 6 | -46.3 | 12 | -8.1 | 18 | -142.5 |
|---|
この解から得られるセグメント間の段差と実際の計測値との差は以下の通り。
| 1 | -0.10 | 7 | -1.44 | 13 | -0.19 | 19 | 2.15 |
|---|
| 2 | -1.54 | 8 | 0.49 | 14 | 1.25 | 20 | -0.19 |
|---|
| 3 | -1.04 | 9 | -1.39 | 15 | 1.25 | 21 | -0.19 |
|---|
| 4 | -2.43 | 10 | 2.34 | 16 | 0.76 | 22 | -0.88 |
|---|
| 5 | -0.10 | 11 | 0.69 | 17 | 0.76 | 23 | -0.88 |
|---|
| 6 | 0.60 | 12 | -0.69 | 18 | 2.15 | 24 | -0.19 |
|---|
う〜ん、これまでの結果と比べてやや悪い。ノイズが大きい上、使用された結果のサンプル数も少なく、かつクリッピング無しでの平均値ということが影響しているのかも。前回の計測との間にセグメントの固定点剥離があったので、高さがかなり変化している。前回との比較は以下の通り。(-400,-240,-80,80,240,400μm)。
|
 |
| 2023/06/19 |
2023/11/22 |
●段差計測その8
| 1 | -213.4 | 7 | -129.1 | 13 | -365.5 | 19 | -160.6 |
|---|
| 2 | 303.7 | 8 | -63.8 | 14 | 0.5 | 20 | -196.6 |
|---|
| 3 | -307.6 | 9 | -252.3 | 15 | -131.7 | 21 | 116.6 |
|---|
| 4 | 60.0 | 10 | -395.3 | 16 | -291.1 | 22 | -8.8 |
|---|
| 5 | -112.5 | 11 | -428.2 | 17 | 165.2 | 23 | -100.3 |
|---|
| 6 | 254.2 | 12 | -84.5 | 18 | 375.5 | 24 | 197.9 |
|---|
上記の結果から、各セグメントの高さ18個を変数とする25個の連立方程式ができる(全体の平均を0とする条件を追加)ので、疑似逆行列を用いて解いてみる。
| 1 | 226.2 | 7 | 33.6 | 13 | -196.8 |
|---|
| 2 | 19.2 | 8 | -302.4 | 14 | -343.9 |
|---|
| 3 | 289.5 | 9 | -75.0 | 15 | 45.1 |
|---|
| 4 | 198.9 | 10 | -155.5 | 16 | 240.1 |
|---|
| 5 | 281.2 | 11 | -144.6 | 17 | -21.1 |
|---|
| 6 | -20.4 | 12 | -14.1 | 18 | -59.9 |
|---|
この解から得られるセグメント間の段差と実際の計測値との差は以下の通り。
| 1 | 6.4 | 7 | -63.5 | 13 | 29.5 | 19 | 13.5 |
|---|
| 2 | -57.1 | 8 | 63.1 | 14 | 93.0 | 20 | 13.9 |
|---|
| 3 | 6.0 | 9 | 16.3 | 15 | 93.0 | 21 | 13.9 |
|---|
| 4 | 22.3 | 10 | -0.4 | 16 | 29.8 | 22 | 19.7 |
|---|
| 5 | 21.9 | 11 | -5.8 | 17 | 29.8 | 23 | 19.7 |
|---|
| 6 | 16.1 | 12 | -9.7 | 18 | 13.5 | 24 | 29.5 |
|---|
これは過去にはなかった酷さだ... 最も怪しい17番を free にして計算しても計算結果が測定値とうまく合わない。18番、2番辺りもちゃんと計測できていない印象。
●PCS から望遠鏡へのコマンド
これまで、PCS 使用の際の装置切り替えと望遠鏡副鏡駆動は望遠鏡制御 GUI(cont380) から行っていたが、これを PCS の Web インターフェースから行えるようにした。PCS 利用開始時、使用中、終了時にすることと望遠鏡へのコマンドは以下の通り。
- PCS (または Alignment 用レーザー)利用開始時
以下のコマンドを cont380 に投げて望遠鏡の状態確認
0000000001,PCS,STATUS ROT.M4RCPOS TEL.ALT TEL.M2X TEL.M2Y
返信を受け取る
0000000001,PCS ,ROT.M4RCPOS=72405
0000000001,PCS ,TEL.ALT=50.000000
0000000001,PCS ,TEL.M2X=-4183.005
0000000001,PCS ,TEL.M2Y=+157.000
0000000001,PCS ,END
ROT.M4RCPOS の値を各装置の設定ファイル INST_NAS2.dat と照合し、現在焦点に何の装置がついているか判断する(±1000パルス幅で判断)。PCS でない場合は、副鏡 XY (TEL.M2X TEL.M2Y) は正しい値だと判断して切り替え前の値として保存する。また、PCS に切り替えた際に駆動ずべき副鏡 XY の値も別ファイルに書き出す。副鏡 XY は通常の望遠鏡初期化動作では原点サーチされないため、切り替え前の値が原点サーチ後の初期値(-4183,+157)であるものとして offset を与えて計算する。
次に、以下のコマンドで装置切り替えと副鏡駆動を行う(Alignment 用レーザーの場合は PCS_align)。
0000000002,PCS,EXEC ROT.NAS2INS=PCS_camera TEL.M2X=-3678.166748 TEL.M2Y=-2410.542725
副鏡 XY の値はこの日の offset と EL 角に応じて計算されたものが入る。このコマンドの完了を10秒間待つ(cont380 からの返信はコマンド受付時にすぐに返ってくるので)。その後、再度望遠鏡の状態を確認する。
0000000003,PCS,STATUS ROT.M4RCPOS TEL.ALT TEL.M2X TEL.M2Y
返信を受け取る
0000000003,PCS ,ROT.M4RCPOS=182800
0000000003,PCS ,TEL.ALT=50.000000
0000000003,PCS ,TEL.M2X=-3678.210
0000000003,PCS ,TEL.M2Y=-2410.485
0000000003,PCS ,END
これで装置が PCS になったことを確認し、PCS の GUI ステータスに反映させる。
- PCS 使用中
PCS 使用中に EL を変更することはあまりないと思うが、EL を変えた際は適切な副鏡 XY に修正する必要がある。
- PCS 終了時
開始時と同様に、状態確認、駆動コマンド送信、状態確認、で完了する。駆動コマンド送信の際には、開始時に保存した副鏡 XY の値を送信する。開始時の装置が不明(リストにないパルス数)だった場合は、ZWO-Cam を選択する。
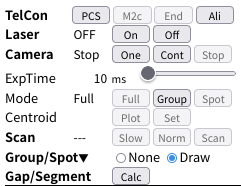
PCS GUI のボタンは上の通り。PCS 使用前は PCS,Ali ボタンがクリック可となっているが、PCS 使用中は M2c(副鏡 XY 調整) と END(PCS 利用終了) Ali(Alignment 用レーザーに切り替え)のみクリック可となる。今の所、END をクリックしてもレーザー光源は OFF とはならないので、その下のボタンで off にする必要がある。
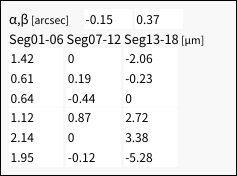
各セグメントの高さも、計測終了後にその場で表示できるようにした。また、18個のセグメントの高さは、7,11,15番のセグメントを通る平面を基準として計算する方が、実際に行っているミラー制御の考え方に沿ったものとなるので、最終値は 7,11,15番の値が常に0となるものとなっている。基準平面の傾き α,β は arcsec 単位で表示される(主鏡制御に送る角度情報は小数点以下5桁まで)。
●副鏡の x,y 原点移動
位相合わせが進み Warping Harness も使うようになったため、主鏡と副鏡の光軸位置が修正となった。現在のハーフミラーの向きは旧原点での EL=90 で合わせてあるのと、EL と副鏡 X,Y の関係が以前の計測とずれている印象があったため、EL と X,Y の関係を計測し直した。
以下、白○は以前の計測値に適当に offset を加えたもの。今回の計測では以前よりも X の変化が大きく、Y の変化が小さくなっていることがわかる。fitting は破線が EL → X,Y で
X=((-0.005555555556EL+0.8214285714)EL-48.61111111)EL-3576.190476
Y=((0.01527777778EL-1.922619048)EL+98.41269841)EL-4657.142857
逆関数(実線)は Y がうまく fit できない感じだ。
|

{kind=link}
{kind=link}
{kind=link}