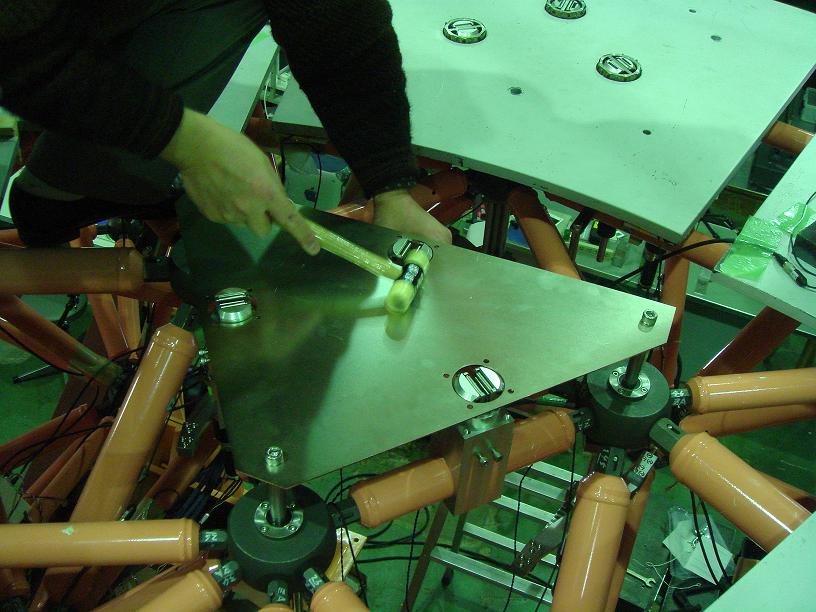
● 架台に搭載しての試験
- 望遠鏡駆動中のノイズのパワースペクトル
以下の条件で、望遠鏡駆動中の維持精度を計測した。
- センサは 12msec 間隔で10回読み出し合計値を受け取る
- エッジセンサセンサ値でのアクチュエータへのフィードバックは 200msec 周期
- 望遠鏡は 6"/sec で駆動、90°,60°,30°で測定
望遠鏡停止状態での以前の結果に比べて、1Hz 付近では望遠鏡停止状態では安定していた
(ラテラル支持部を正確に取り付けたことで動きが安定したかも)。望遠鏡駆動中は、1Hz 付近の
不安定性が増加し、望遠鏡が30°になると、低周波成分が全体的に増える。
望遠鏡駆動中のセンサ値の標準偏差は以下の通り。
| | 90° | 60° | 30° |
|---|
| エッジセンサ1番 | 9.6nm | 8.8nm | 14nm |
|---|
| エッジセンサ2番 | 9.6nm | 8.0nm | 11nm |
|---|
結果の詳細は森谷さんのページ参照
- 支持方法変更と横ずれ測定
ダミー鏡に横方向のストレスが加わらないような支持方法で支え、ラテラル支持支柱の位置を
正確に設計位置に合わせてから、横ずれを再測定した。
しかし結果は、
- 倒してからも1分間以上数~10μmレベルの変形がじわじわ続く
- 起こした時の再現性は向上したが、倒した時の安定性は悪化
で、1分間以上じわじわ変形が続く原因がラテラル支持支柱側にあるのか、固定リング側にある
のかは不明。
結果の詳細は森谷さんのページ参照
- パワーシリンダ
パワーシリンダで比較的安全に上げ下ろしできることが確認できた。
- セラミック基板センサ
シグマ光機の読み出し回路を用いて、これまでのセンサと同じ条件で36時間読み出した。
左図:セラミック基板センサ これまでのセンサ
右図:シールドなし シールドあり
- 温度変化に対する安定性が悪い
- スパイク状のノイズが乗る → シールドすることで解消できることを確認(右図)
- 通常のノイズが大きい
- 分解能が悪い
- 同程度のカウントのセンサからの干渉は受けない
結果の詳細は森谷さんのページ
その1/
その2/
出口くんのページ
参照
● オートコリメーション試験
- 光源ユニット
内周鏡のみの状態で主焦点補正レンズとしても使えるもの(視野は狭いが)
ファイバーで光を入れ、CCD で戻ってきた像を見る
- 蒸着鏡で試験
まずは、既に蒸着されている1枚目の鏡でテスト。
 
昼間は振動が激しすぎて測定できないため、夜中に自動測定して朝に回収する。
- 鏡の中央が-0.3μm、その周辺部が+0.3μm、外周部は非常に悪い
- FARO の計測結果とは理想的な配置位置から5mm程度のずれを示している
とにかく、何らかの理由で全体の軸位置がずれるか、傾くかしているようだ。
- 非蒸着鏡で試験
1枚目よりは良いはずの2枚目で試験、蒸着はしていないのでCCD前のフィルター
は外し、光源をパワーのあるガスレーザに変え、ファイバーコア径を太いものに
変えて像を測定する。ビームスプリッター内部での反射で背景光がかなり明るくなる。
 
もう少し調整が必要な状態。FAROでの測定結果との違いはかなり小さくはなっている
印象だが、FAROでの測定値をもとに設計位置にだんだん近づけて結果の変化を見ている
状況
● 主鏡シミュレータ
|
{kind=link}