| ハーフミラーホルダ調整2 |
|---|
岩室 史英 (京大宇物)
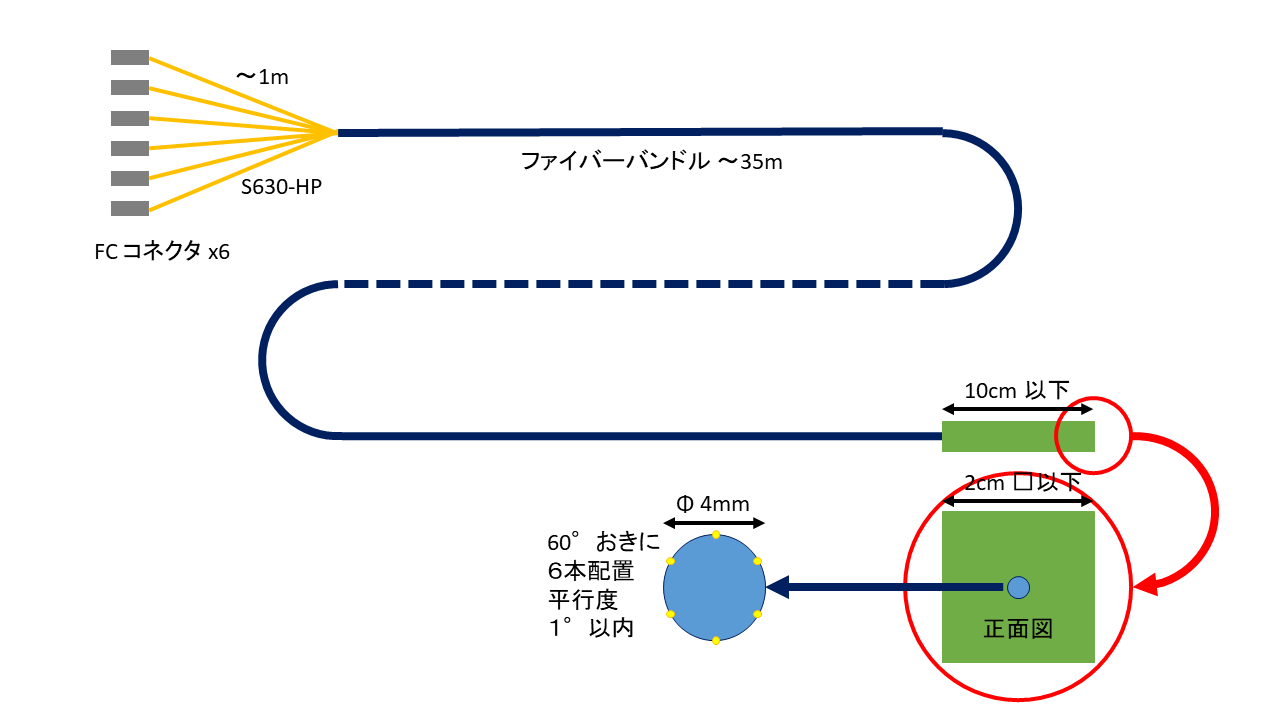
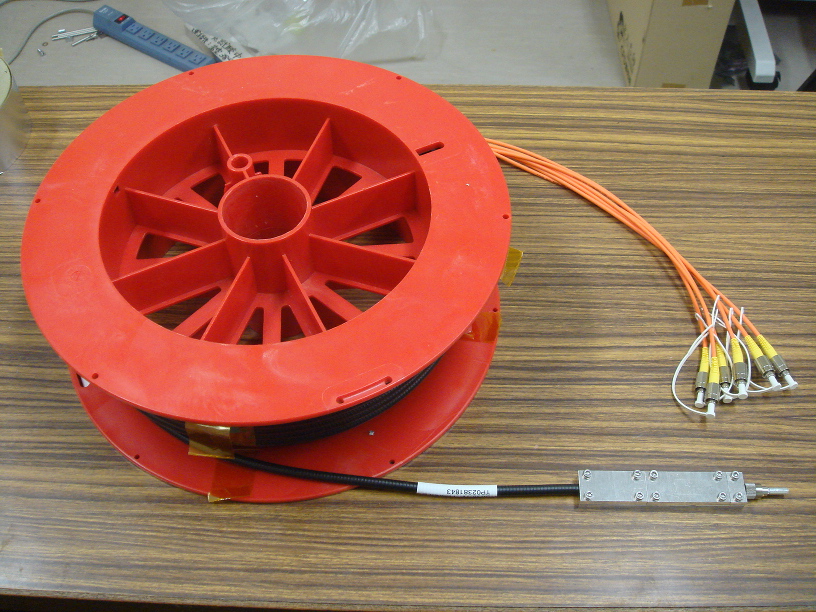
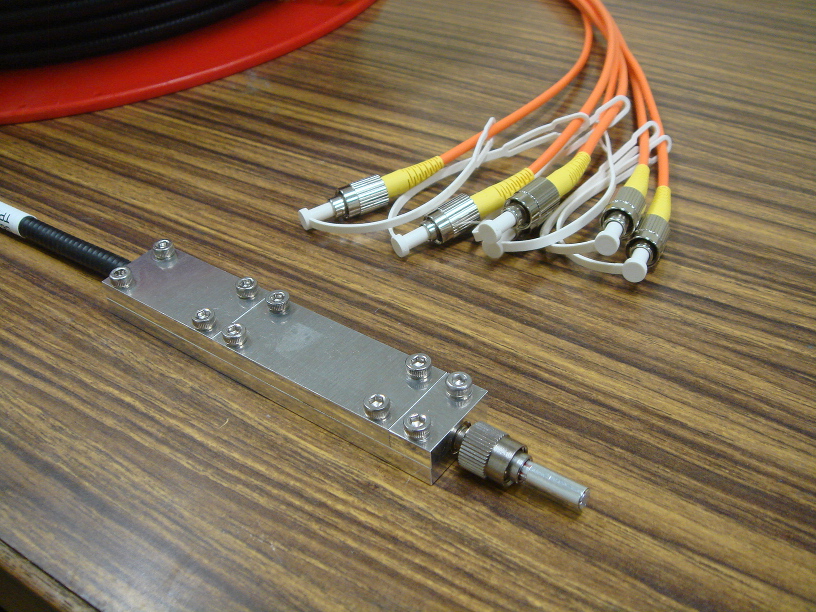
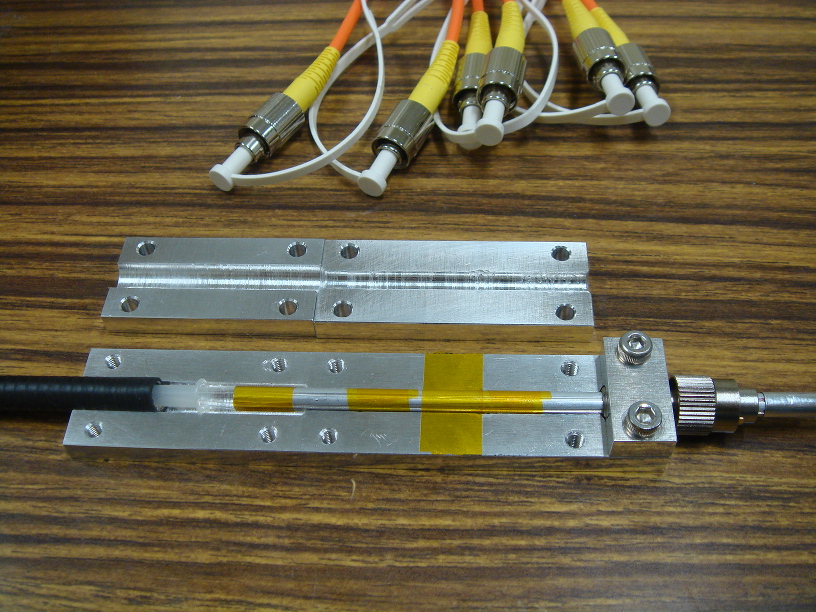
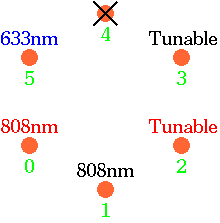
●これまでの開発経緯●小型装置ポート用ファイバーバンドル
|

●段差計測
|
●段差計測その2
|
●段差計測その3
この間、ミラー清掃作業が間に入ったので、再度ハーフミラーの向きを微調整してからの計測。調整量は小さいので、3時間程度の作業で全ミラーの調整は完了した。とりあえず、チューナブルレーザの slow モードと normal モード10回ずつの計測を1セットとし、これを4セット行なってみた。3セット目は主鏡制御 ON のままでの計測、それ以外は計測直前に OFF にして計測した。
次に気になるのが slow モードと normal モードでの計測結果のズレだ。15番の2セット目に関して、slow モードと normal モードでの位相計測状況を確認してみる。slow モードは normal モードの 1/10 のスキャン速度・範囲 なので、縦軸を10倍に拡大して表示している。
次に、望遠鏡の EL を90°から30°まで10°ずつ減らし、スポット位置のズレを副鏡の XY 移動で修正してみた。修正後のスポット位置は以下の通り(90°から50°までの5画像アニメで、40°と30°はキャプチャし忘れ)。この時の副鏡 X,Y 移動量は下右図。 fitting は破線が EL → X,Y で
X=((-0.007861111111EL+1.282261905)EL-73.28650794)EL-2236.857143 実線が X,Y → EL で(90°まで計算できないが...)
EL=(-1.136026773e-04X-0.9662693065)X-1963.233905
最後に EL 30°での段差計測を2セット行なってみた。1セット目は主鏡制御 ON のまま計測した。
以下は15番の2セット目の位相計測状況。normal モードで1度だけ位相接続に失敗していることがわかる。

その後の調査で、プログラムの修正部分にバグが1ヶ所あることを発見、修正した。これで安定すると思うが...
●段差計測その3-2
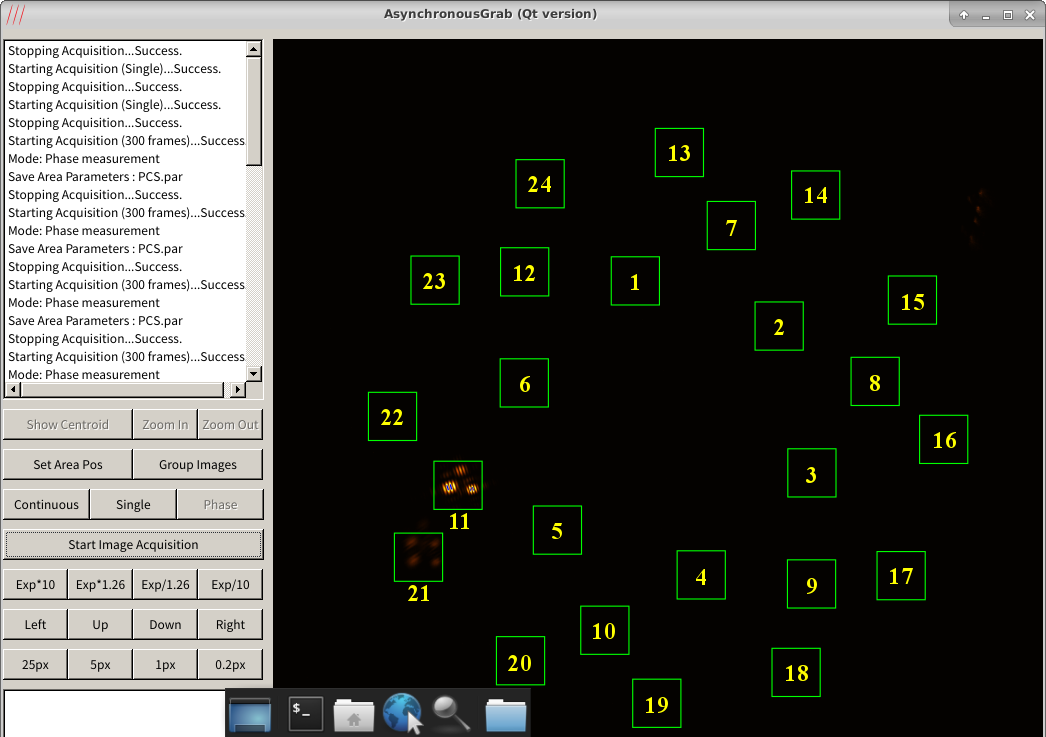
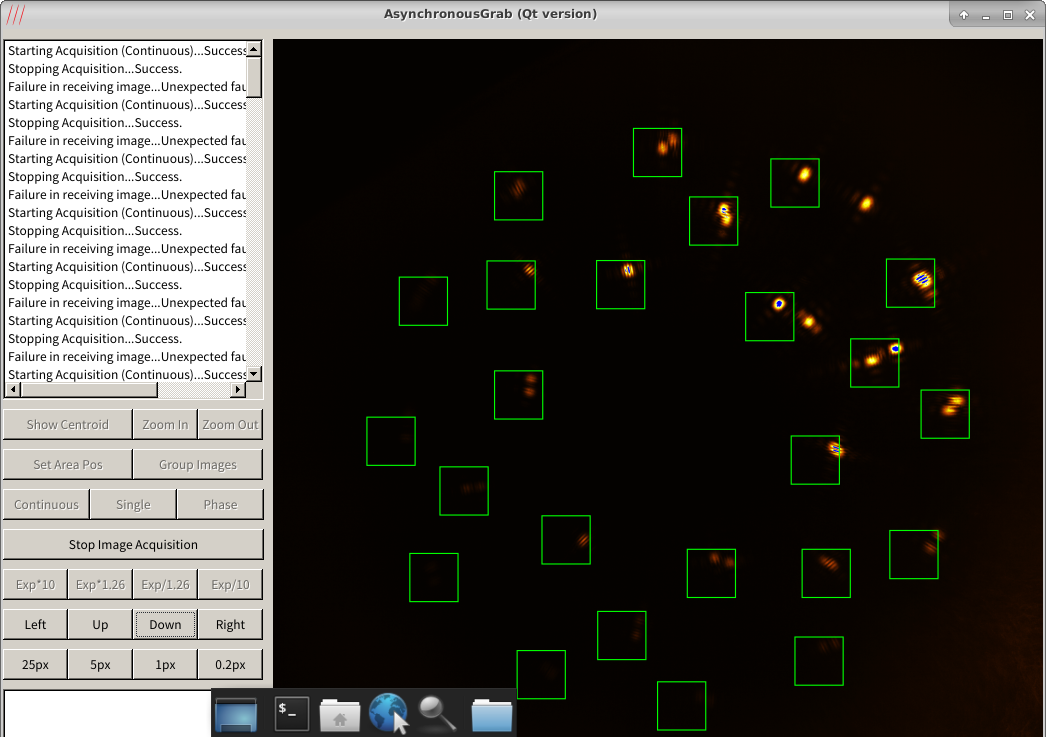
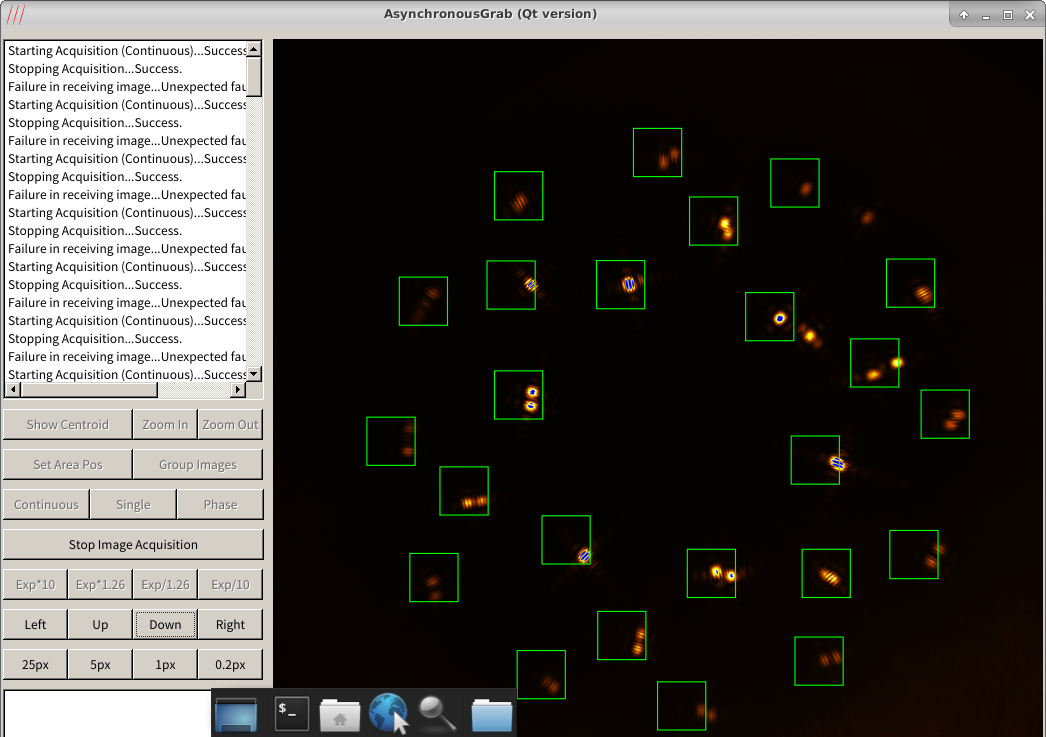
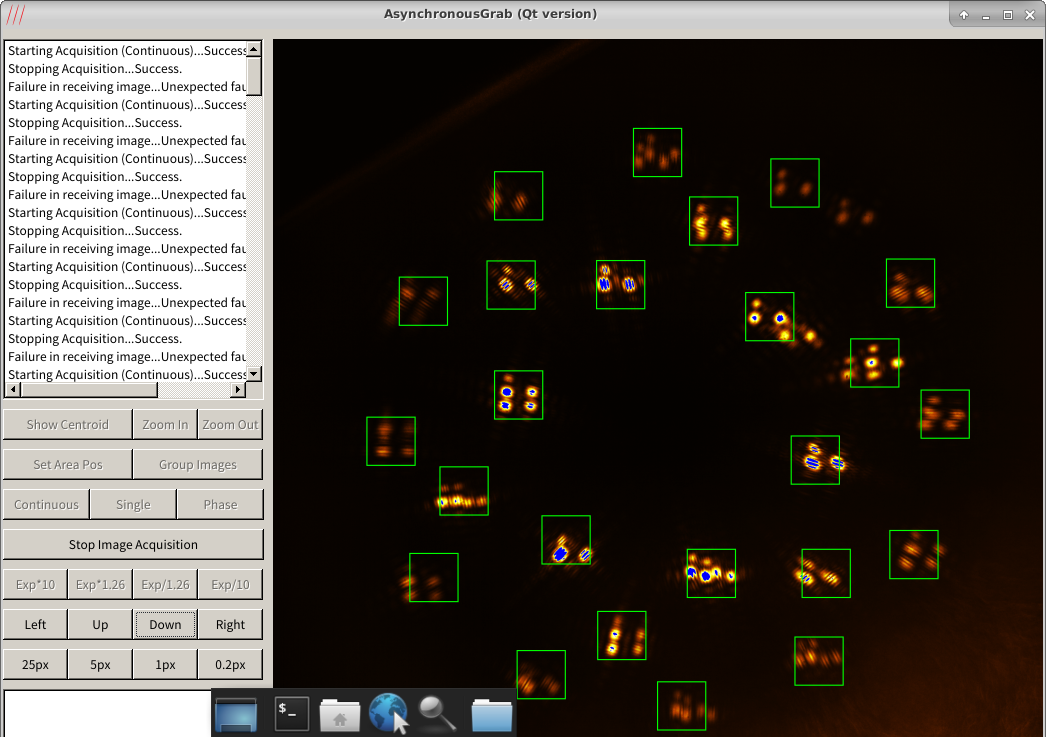
外周セグメント間のスポットしか見えてないので、副鏡を X,Y 方向に±1.5mm ずつ動かして近くにいないか調べてみたが、3つほどしか発見できず残りの9ヶ所はかなりずれてしまっているようだ... と思ったが、計測後に気付いたが、Rotator の駆動モードを EL 同期にすることを忘れており、全体的に90°ほど左回転していたようだ。90°回転していると、60°おきに配置されている内周間、内外周間のスポットがマイクロレンズの中間に来てしまうため、外周しか見えていない原因はこれだったようだ。 以下、グラフ中の数字は番号を正しいものに付け替えているが、画像は90°左回転した状態になっていることに注意。
●段差計測その4
下左図は 2 番ファイバーの光量分布で、下右図は計測時の状態。内周右上(2番)、内外周右(8番)、外周右上(14番)のスポットが離れすぎていて、縞が計測できない状態。これは後にセグメント18のラテラル支持部分の接着が剥離している事が判明した。
|