Web モニタでミラー制御を OFF にした後、清掃を行なうセンサ回路ボックスの電源を抜いて、センサへの通電を止める。
作業前にセグメント隙間からの水漏によるセンサ故障を防ぐため、清掃を行なうセグメント周辺のセンサ真上の隙間の水漏れ対策を行なう。
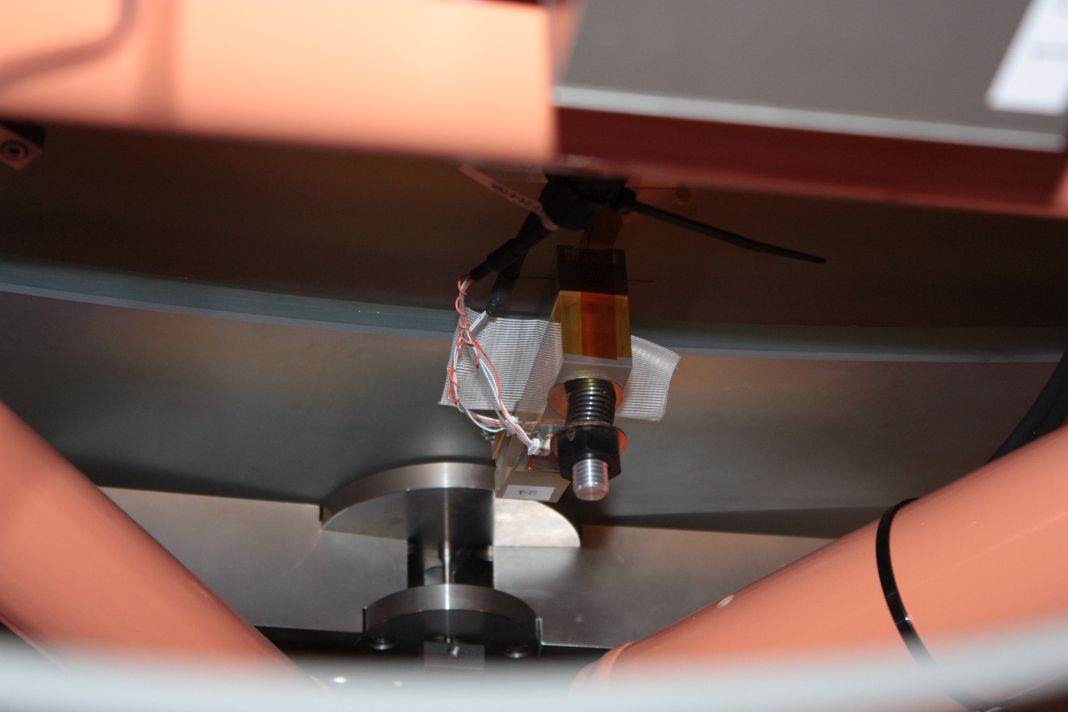
清掃中の水は全て光軸側に流れるので、内側のセンサアーム背面に付いている参照センサ真上に養生テープの接着面を2つ折りにしたものでひさしを作っておく。
半径方向の隙間や外側の隙間に水が出ることはまずないので、内側以外の隙間は手拭き用の紙を丸めたもの程度で大丈夫。
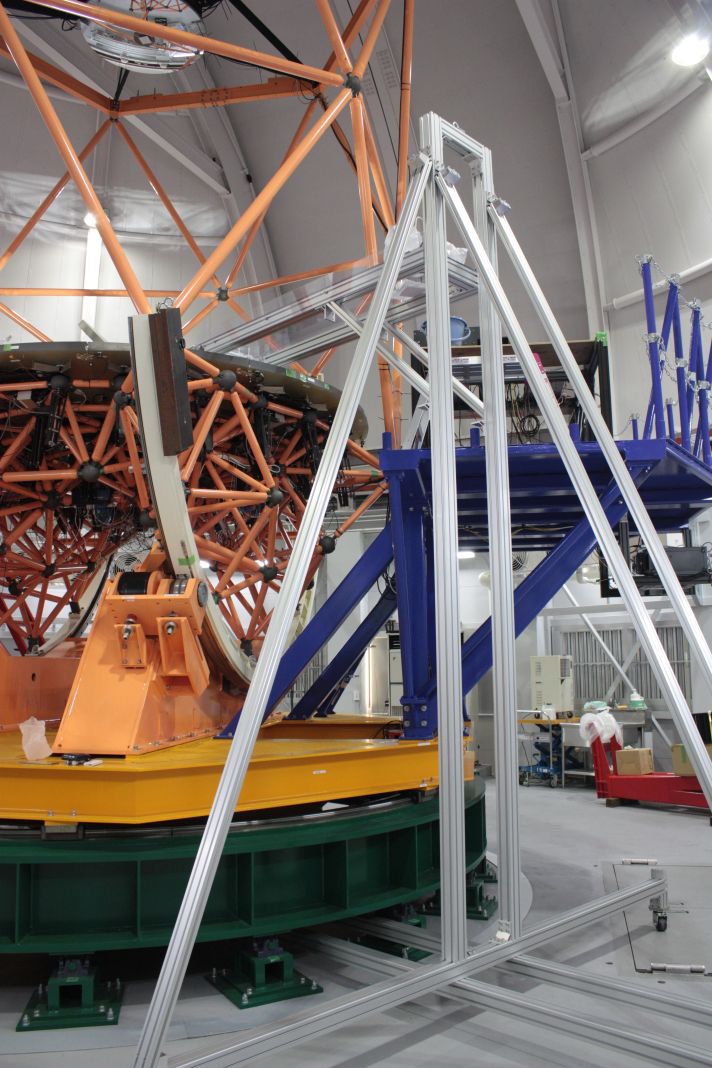
ナスミス大の手すりを3本外し、作業台を上写真のように設置する。作業台の位置を調整する補助員が2名ほど居ることが望ましい。
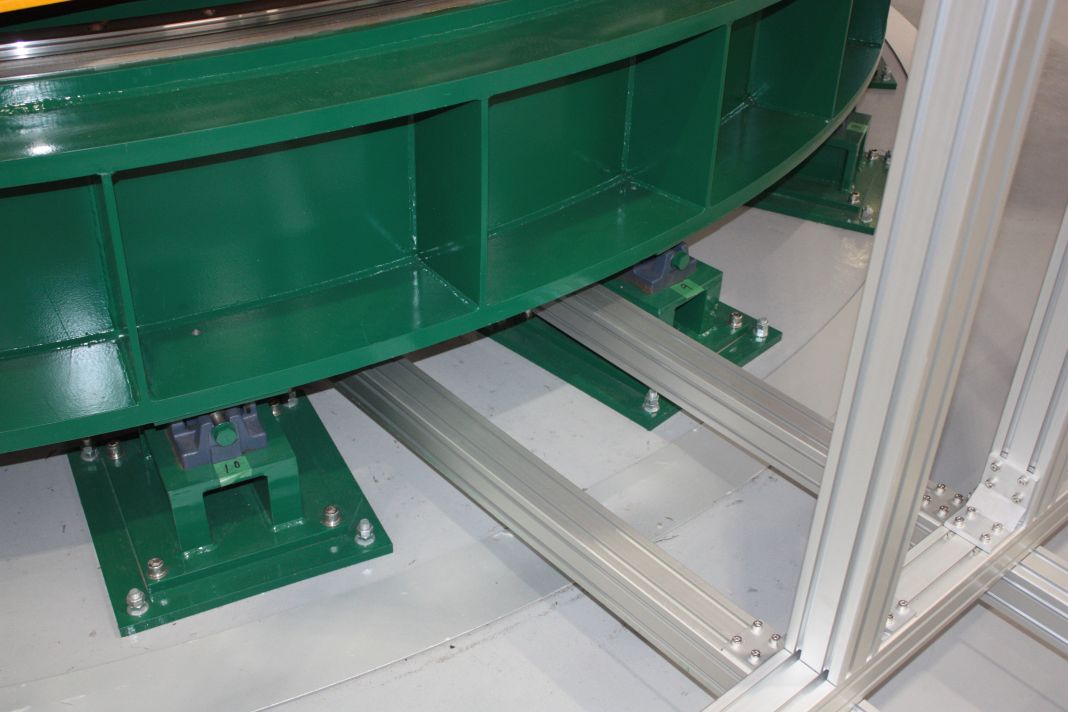
ベース部分の車輪は、Az レベリングブロックの9番と10番の間から入れる。これより左だと Az 下のケーブルに車輪が当たるので良くない。また、上に人が乗っている状態で写真中央のアルミプレートを超えると、重量でプレートが曲がってしまうので、乗り込み前に前輪がここを越えている方がいい。
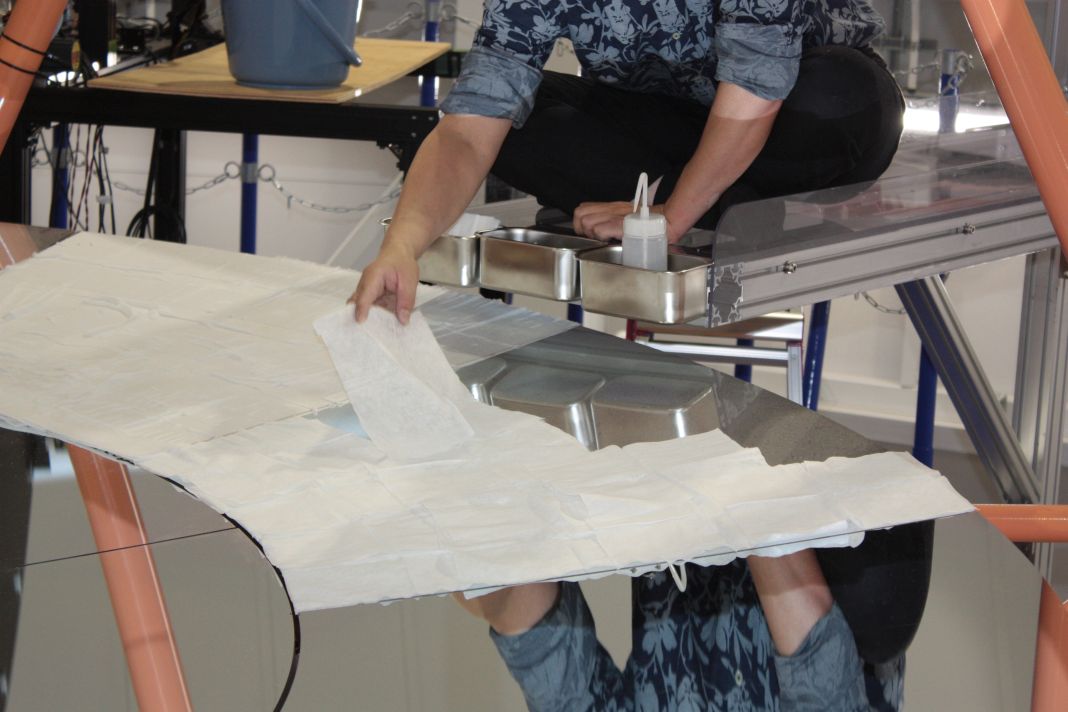
コットンシーガルをセグメントの形状に合わせて 1/3 程度重なるように並べる。後で一気に全部がめくれるように同じ方向に重なりができるように並べる。
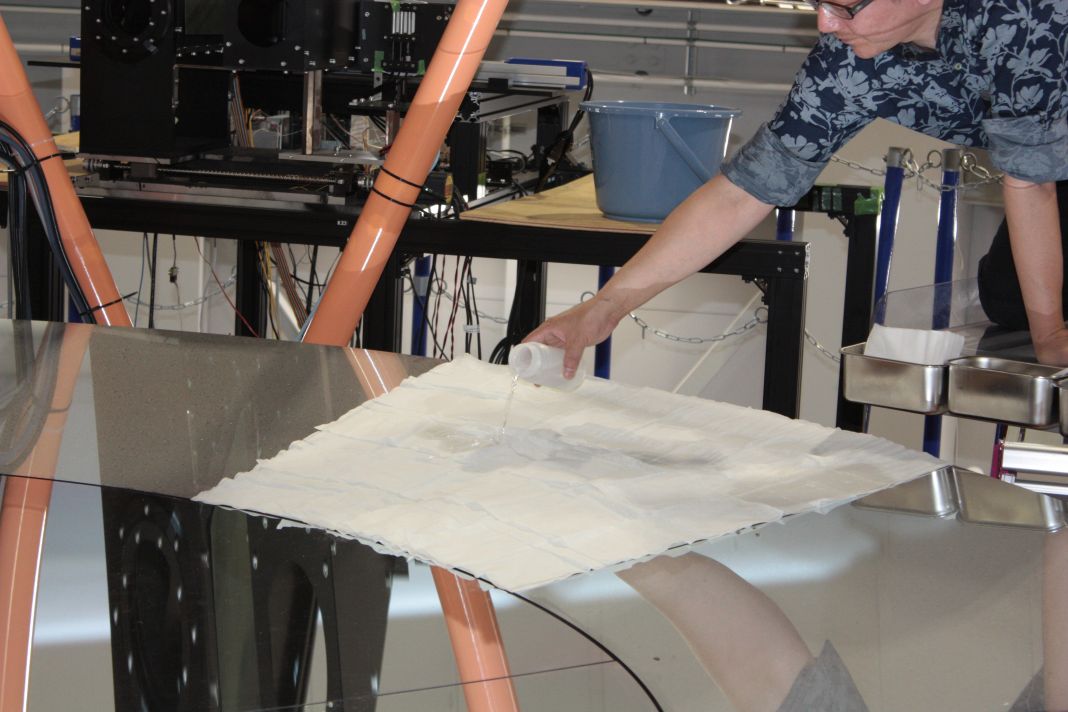
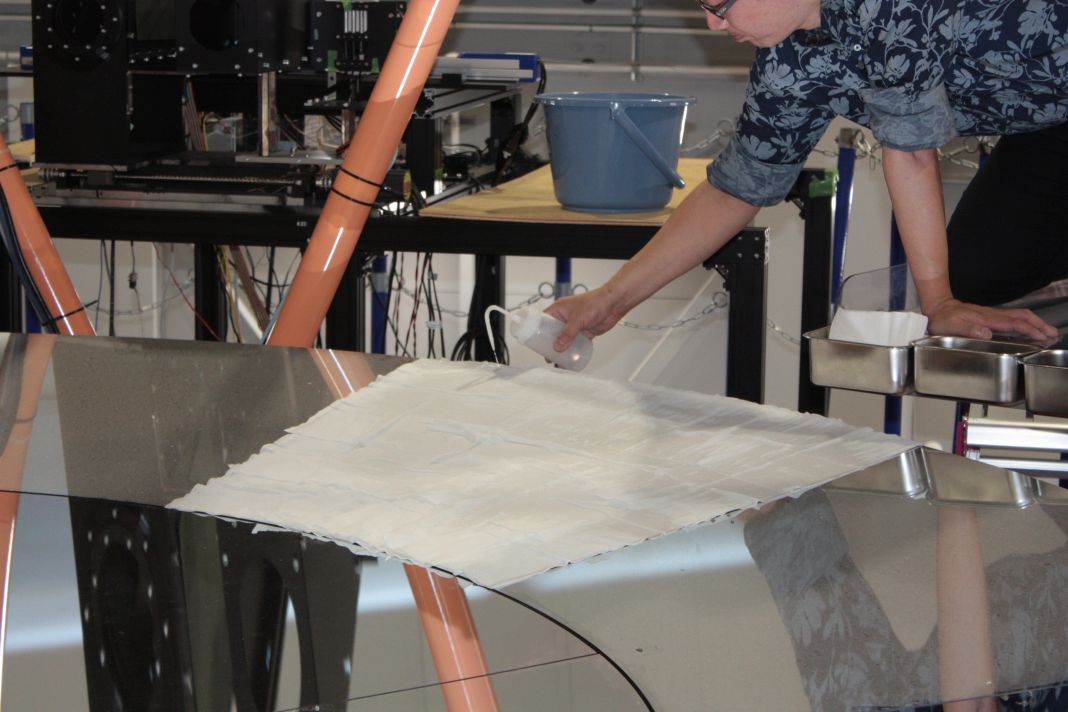
セグメント端に水が流れないように、外周側から蒸留水をまく。セグメント1枚あたり小ボトル1本(250cc)程度。
小ボトル半分程度の水で周辺部をノズルで端まで濡らす。内周側の幅10cm 程度は流れた水で自然に濡れるので水をかける必要は無いが、内周側が均一に濡れるように水の流れが少なそうな部分には少し水を追加する。
内周側の縁に沿って、コットンシーガルを細長く4つ折りにしたものを並べ、内側への水垂れを防ぐ。
30分程度の蒸らし時間が必要なので、隣のセグメントの蒸らし作業を行う。
大きいボトルに蒸留水をためておけば、小ボトルの水が無くなったときに補充できる。
内周側の縁に配置した4つ折りのコットンを除く。
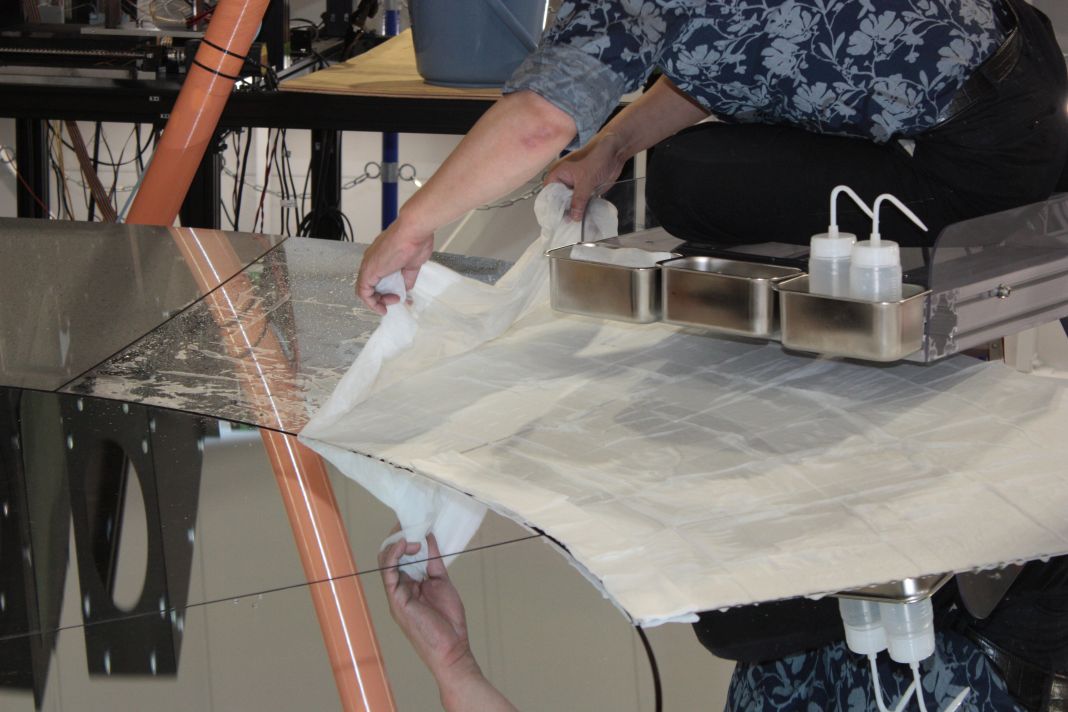
一番初めに置いたコットンからめくりあげることで、全体を一体化させてめくりながら持ち上げる。
一気に反転させて着地させる。位置がずれても横ずれさせずにうえから軽くポンポンと押さえる。
くるくると巻き取りながら全て取り除く。大きいゴミがあるので横ずれしないように注意する。
コットンシーガルを1枚置いて十分に蒸留水で濡らす。
コットンシーガルの端が少しだけ鏡面に触る状態まで持ち上げて少しずらすと、触っている部分に汚れが集まるので汚れた部分を巻き取り、また少しずらして巻き取るを繰り返す。
次々とコットンを取り替えながら、全面が5回程度は撫でられるように繰り返す。作業序盤はゴミが残っているので、ゴミをできるだけずらさないように絡め取る事に注意し、後半は目に見えないレベルで汚れた水をできるだけ薄める事を意識する。
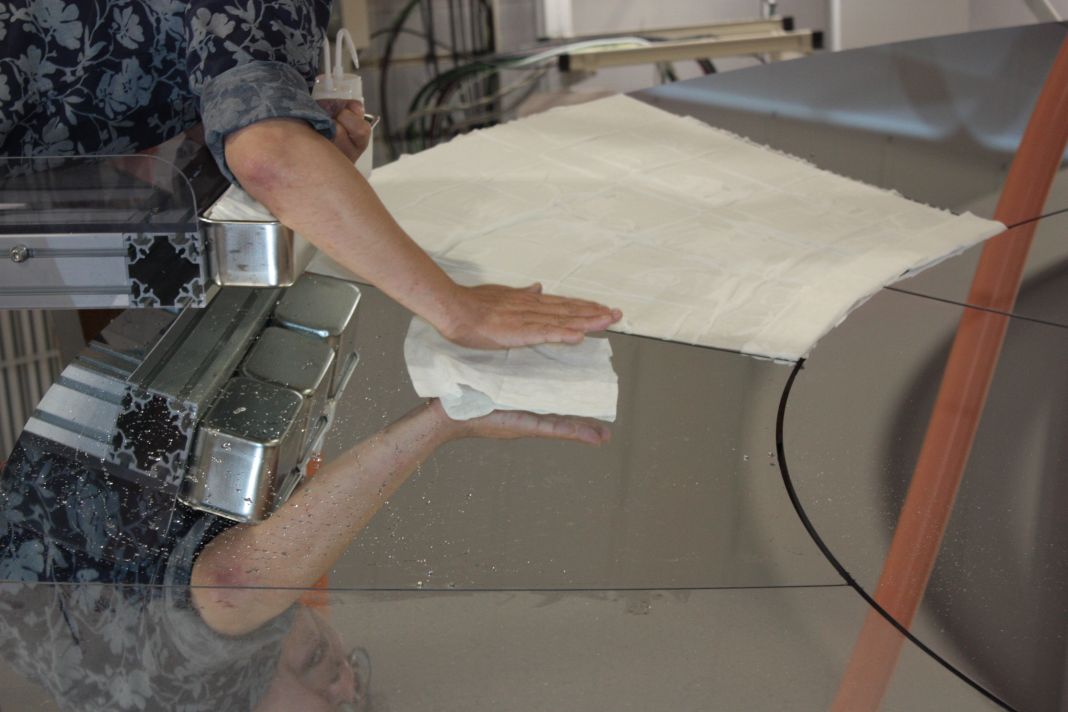
最後に残っている水を乾いたコットンを敷いて手で軽くポンポンすることで吸い取る。もちろん手に汗をかいていないこと。また、乾いたコットンは引きずらないこと。
隣のセグメントも同じ手順で作業する。
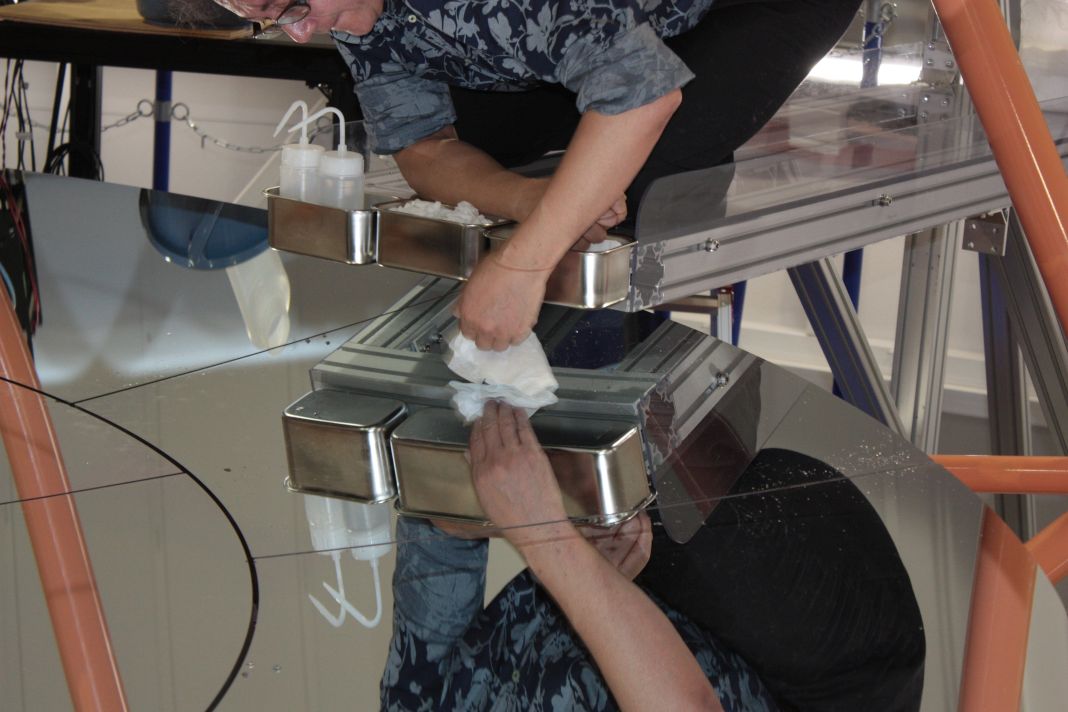
作業後の水滴を吸い取っているところ。
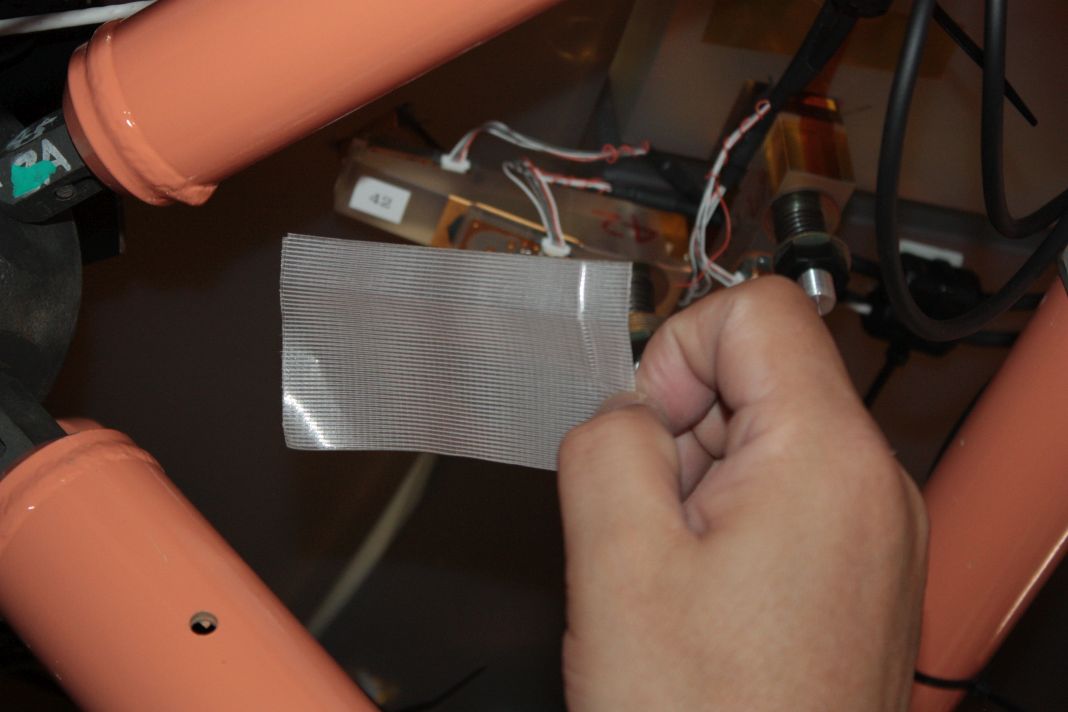
センサの保護のために入れておいたものを取り外す。先端の平たいピンセットを使うと楽。
センサ上のひさしを抜く際は、センサアームに引っかかってアームが動くことが無いよう、十分に注意してゆっくり抜く。こちらは手でやった方が感触がわかって安全。
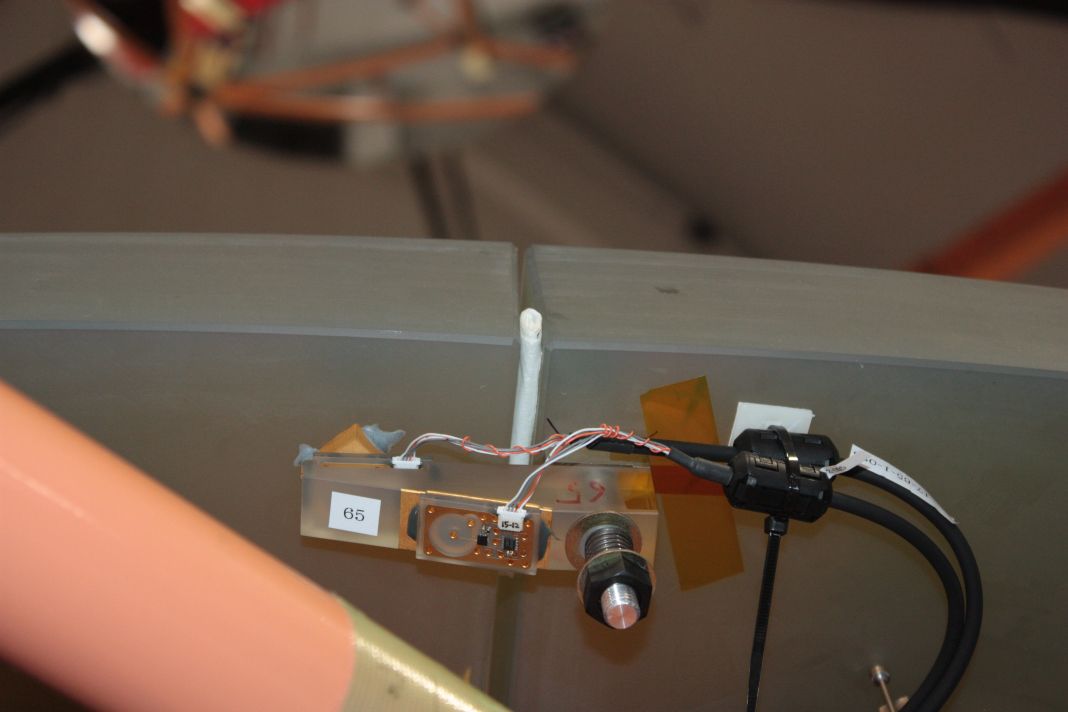
センサの制御 Box に電源線を挿し、Web でセンサの値を確認する。-4 という値が出た場合は、参照センサとアームの間に水が入っているので、Box の電源線を抜き、紙などで隙間の水を吸い取る。